This repository holds the Gazebo model database.
Learn more about the database here.
Learn how to contribute models here.
Gazebo database of SDF models. This is a predecessor to https://app.gazebosim.org
Home Page: http://gazebosim.org/
License: Other















































































































































Original report (archived issue) by Thomas Koletschka (Bitbucket: thomasko).
The inertia of the cordless drill (used in VRC Qualification) are very bad (it doesn't even stand still on a flat surface): http://www.youtube.com/watch?v=aoqEToJzFrw
Also the mass needs to be upped to 1.5kg (according to the current qualification draft)
Same goes for the Coke Can (which, in addition is way too big for a coke can) and probably other models in the gazebo_models database.
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
One of the drawbacks of the current erb model approach is data duplication. Several of the model.sdf files changed in pull request #167 are generated from sdf templates. We should repeat these changes for the relevant templates.
gazebo
gzserver: /build/ogre-1.9-1cyErK/ogre-1.9-1.9.0+dfsg1/RenderSystems/GL/src/OgreGLSupport.cpp:56: virtual void Ogre::GLSupport::initialiseExtensions(): Assertion pcVer && "Problems getting GL version string using glGetString"' failed. gzclient: /build/ogre-1.9-1cyErK/ogre-1.9-1.9.0+dfsg1/RenderSystems/GL/src/OgreGLSupport.cpp:56: virtual void Ogre::GLSupport::initialiseExtensions(): Assertion pcVer && "Problems getting GL version string using glGetString"' failed.
orangepi@orangepi4-lts:~$
Any clue as to how to fix this?
Original report (archived issue) by Louise Poubel (Bitbucket: chapulina, GitHub: chapulina).
Makes it hard to use 😉
gazebo_models/hammer/model.sdf
Line 4 in 12134a9
IssueForNewDevelopers
Original report (archived issue) by Brian Gerkey (Bitbucket: Brian Gerkey, GitHub: gerkey).
It would be nice to branch this repo to avoid accidentally pulling in changes for use in VRC. If we do this, we'd also have to change:
tools/set_vrc_private.sh script in cloudsim-client-toolsWe'd have to make sure that teams can't get out of sync with the models that we want them to use.
Dear members,
for operation robot, many research should move robot in simulate environment, so, often need human organ model. could some contribute some profession model for help us?
Tks~
Original report (archived issue) by Koen Lekkerkerker (Bitbucket: koenlek).
While I was testing citysim (https://bitbucket.org/osrf/citysim), I noticed I was getting these errors at startup:
[Wrn] [FuelModelDatabase.cc:248] URI not supported by Fuel [model://stop_light_post]
I check the source code on this repository (gazebo_models), and it clearly exists. However, if I check http://models.gazebosim.org/, it does not exist. Is there something going wrong in the deployment pipeline to http://models.gazebosim.org/?
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
The rear wheels of polaris sink into it. Need to make the collision shape thicker.
Original report (archived issue) by Matthijs van der Burgh (Bitbucket: MatthijsBurgh).
As annouced in https://bitbucket.org/blog/sunsetting-mercurial-support-in-bitbucket, Bitbucket is ending the support for Mercurial. The support ends on May 31st 2020.
Is there any timeline for OSRF to move their repositories to Git?
Original report (archived issue) by Louise Poubel (Bitbucket: chapulina, GitHub: chapulina).
Several models in this repository make use of gazebo.materials, which is installed with Gazebo-classic.
This means these models are not easily portable to other software, like GzWeb and Ignition Gazebo.
I'd suggest we update all models in this repo, and consequently their copies in https://app.ignitionrobotics.org/fuel/models, to not rely on that file.
In the near-term, I'd suggest we:
Gazebo/Grey to use SDF material tags (ambient et. al.) instead.Gazebo/Wood into the models that use themIn the long term, considering that the support of Ogre materials in GzWeb is hacky and that Ignition Rendering is meant to be render-engine-agnostic, we should consider deprecating support for these files, or at least offering SDF-native ways of doing most of the things they do. I believe this ties to some of the PBR work being done right now.
Some models (eg: Ambulance, Bus) are visible on the left panel in the Insert column but I am not able to see the model in Scene after clicking the name. But most of the other models are working fine.
What is the pipeline to create a Gazebo world based on an actual physical location, like the Yosemite world? I am looking to re-create a location with accurate geo-spatial features as well as man-made structures like buildings (think Gazebo world equivalent of a Google Earth location). Intended application is autonomous UAV navigation.
Original report (archived issue) by Anonymous.
https://osrf-migration.github.io/gazebo_models-gh-pages/#!/osrf/gazebo_models/pull-requests/241
I am inserting a demo file demo_joint_types.
Every link is coming to origin s soon as I click to start the simulation.
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
The grip_2 and grip_3 ARAT tasks call for pegs to be attached to the wooden_case, but the wooden_case doesn't yet have any variants that include an attached peg.
Original report (archived issue) by Jackie K (Bitbucket: jacquelinekay).
The following models need meshes:
washer
plastic_cup
tube_2_25cm
tube_9_5_mm
case_base (in pull request)
case_top (in pull request)
After this task, the ARAT models will be nearly complete. We will want to refine the moments of inertia and contact properties for some models, however.
Original report (archived issue) by John Hsu (Bitbucket: hsu, GitHub: hsu).
need fingernails for fine manipulation of small objects (ball bearing, washer, marble)
Original report (archived issue) by Jackie K (Bitbucket: jacquelinekay).
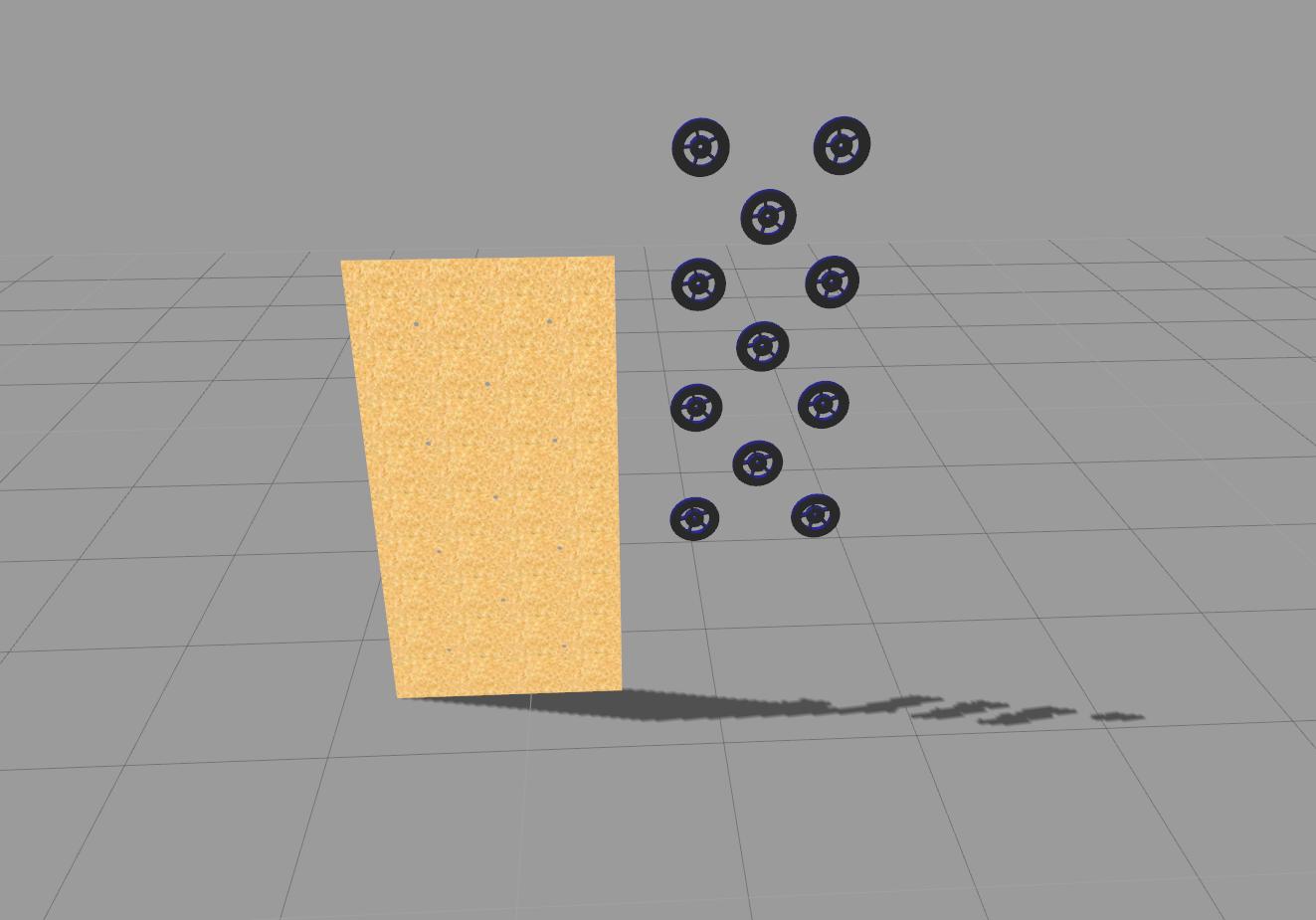
The original report had attachments: default_gzclient_camera(1)-2014-09-23T15_01_00.959930.jpg
There is a physics bug that happens whenever I spawn the model wheel_valve_wall. The wheels fly off of the wall and crash to the ground/off the map.
https://github.com/osrf/gazebo_models/blob/master/zephyr_delta_wing/meshes/wing.dae
how can I access this file? I have been trying to clone the gazebo_models repository without luck. A zip import does not return lfs links, and regular git clone gets rejected based on quota.
I tried manually downloading, but this does not work as well.
Best Regards,
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
Hi,
Can someone on this list fix these two models on the gozeboism.org
website? Its just a small change. The models have a new model.sdf with
the latest version of SDF 1.5 and the earlier version SDF 1.4 is
pushed to a file named model_1-4.sdf . However the sdf tags in the
model.config are yet to be updated. They still have
model.sdf
This gives parsing errors when you try to spawn these models. Could
someone please update the model.config file on the website to point to
the correct version? I updated it on my local machine and have it in
the cache. However when I try to spawn it from the website, I keep
would run into the same problem.
Thanks,
Poornima Kaniarasu
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
For example, the houses, gas station, and fast food place are not static, but have mass of 1 kg. These should probably be static.
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
Revive pull request #155 when sdformat 2.3.1 or later is released into Ubuntu vivid. @_jrivero_
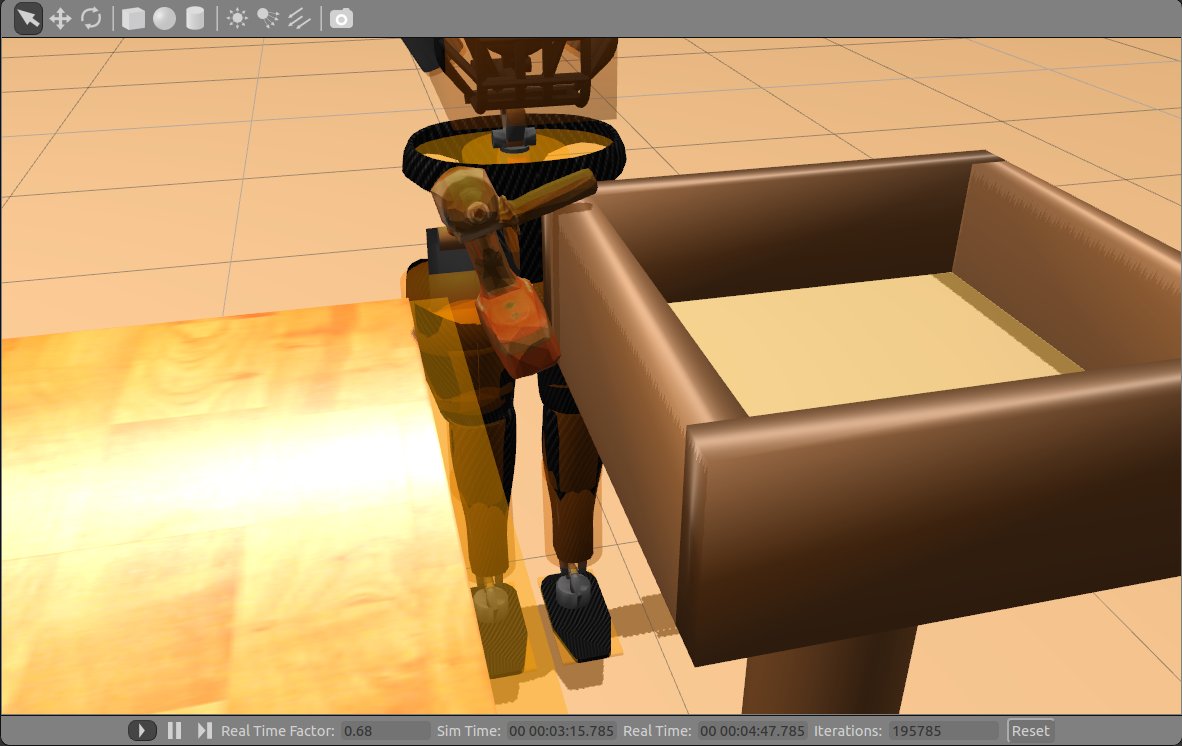
Original report (archived issue) by Stefan Kohlbrecher (Bitbucket: Stefan_Kohlbrecher).
The original report had attachments: table_collision_geom.jpg
The table's collision geometry is wrong and extends beyond the visual geometry on the sides. See attached image.
Original report (archived issue) by John Hsu (Bitbucket: hsu, GitHub: hsu).
In Setup your model directory, Model Database documentation does not exist.
In Build the Model's Structure 3.), Insert Model does not exist.
$ git clone https://github.com/osrf/gazebo_models
Cloning into 'gazebo_models'...
remote: Enumerating objects: 11065, done.
remote: Counting objects: 100% (1/1), done.
remote: Total 11065 (delta 0), reused 1 (delta 0), pack-reused 11064
Receiving objects: 100% (11065/11065), 872.11 MiB | 6.10 MiB/s, done.
Resolving deltas: 100% (5643/5643), done.
Updating files: 100% (2120/2120), done.
Downloading ocean_floor_shipwreck/meshes/underwaterworld.dae (160 MB)
Error downloading object: ocean_floor_shipwreck/meshes/underwaterworld.dae (fa846ef): Smudge error: Error downloading ocean_floor_shipwreck/meshes/underwaterworld.dae (fa846ef73f68d9cfe6e41c97c0975202956c93f96321f8706c3bd3418fa035e4): batch response: This repository is over its data quota. Account responsible for LFS bandwidth should purchase more data packs to restore access.
Errors logged to '/Users/kehan/Workspace/Projects/qyun_ws/gazebo_models/.git/lfs/logs/20220419T234433.392377.log'.
Use `git lfs logs last` to view the log.
error: external filter 'git-lfs filter-process' failed
fatal: ocean_floor_shipwreck/meshes/underwaterworld.dae: smudge filter lfs failed
warning: Clone succeeded, but checkout failed.
You can inspect what was checked out with 'git status'
and retry with 'git restore --source=HEAD :/'Original report (archived issue) by Nate Koenig (Bitbucket: Nathan Koenig).
I set emissive values in:
construction_barrel/meshes/construction_barrel.dae
construction_cone/meshes/construction_cone.dae
stop_sign/meshes/stop_sign.dae
And changed the mailbox's texture to be brighter:
mailbox/materials/textures/Mailbox_Diffuse.tga
These are hacks. Lighting in Gazebo should be fixed, and these changes reverted.
Original report (archived issue) by Nate Koenig (Bitbucket: Nathan Koenig).
Original report (archived issue) by John Hsu (Bitbucket: hsu, GitHub: hsu).
Original report (archived issue) by Shane Loretz (Bitbucket: Shane Loretz, GitHub: sloretz).
It's unclear what the license is for some models. While the Repository has a license file saying Creative Commons Attribution 3.0 Unported, not all models were submitted by the creators.
In particular the grey_wall author isn't the person who submitted it to this repo. Here the author says there is a pull request for DRC with some models. That pull request, which has grey_wall, was submitted by someone else, and it doesn't give a license. I don't see a license file in the DRC repo either. Later it was added to gazebo models in this pull request by a third person.
One way to resolve this is to make every author indicate the license when they make a pull request. Authors could be required to include a LICENSE file in the model folder, or specify a tag in the model.config indicating the license.
Original report (archived issue) by Brian Gerkey (Bitbucket: Brian Gerkey, GitHub: gerkey).
The vehicle has U-shaped handrails protruding horizontally from the roll cage on either side of the seat. The visual includes them; the collision should, too.
Original report (archived issue) by John Hsu (Bitbucket: hsu, GitHub: hsu).
Currently it looks like all models have been converted to sdf.
We should support URDF format for ROS community.
Original report (archived issue) by Jackie K (Bitbucket: jacquelinekay).
When comparing to the map, the origin of the GPS coordinates are not correct and seems to be off a few hundred meters.
I tried fixing this comparing on google maps, but changing
https://github.com/PX4/sitl_gazebo/blob/12da9e6104aaf72a0c52bf802644310f0c5b1ee1/worlds/mcmillan_airfield.world#L18-L23
Didn't have an effect on setting the gps origins. It seems like https://github.com/PX4/sitl_gazebo/blob/master/src/gazebo_gps_plugin.cpp#L51 is not able to be modified.
@ahcorde Is there somewhere else that the world origins are set?
Cross posted from PX4/PX4-SITL_gazebo-classic#496
Original report (archived issue) by Louise Poubel (Bitbucket: chapulina, GitHub: chapulina).
This inertia matrix doesn't satisfy the triangle inequality.
Trying to load the simple arm with simbody:
gazebo --verbose simple_arm.world -e simbody
Results in this error:
[Err] [SimbodyPhysics.cc:326] EXCEPTION: Simbody build EXCEPTION: SimTK Exception thrown at MassProperties.h:552:
Error detected by Simbody method Inertia::setInertia(xx,yy,zz,xy,xz,yz): Diagonals of an Inertia matrix must satisfy the triangle inequality; got 1.11,100.11,1.01.
(Required condition 'Ixx+Iyy+Slop>=Izz && Ixx+Izz+Slop>=Iyy && Iyy+Izz+Slop>=Ixx' was not met.)
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
This prevents the use of the joint control widget in gazebo for actuating the joints.
Original report (archived issue) by Dereck Wonnacott (Bitbucket: dawonn).
The default install path for gazebo_models is: /usr/share/models/
Gazebo's default installation seems to default to: /usr/local/share/gazebo_models
Shouldn't these be configured to mate by default? I know it doesn't really matter much since the typical use case is to pull models from the web, but I thought I'd point it out.
Original report (archived issue) by Thomas Koletschka (Bitbucket: thomasko).
It is not specified what kind of Hokuyo it is but given the visual model it's a Hokuyo URG-04LX[1] or LN so all the specs should be modified to match the real lidar and the model name should probably be adjusted as well such that the user knows which Hokuyo it is.
[1]http://www.hokuyo-aut.jp/02sensor/07scanner/urg_04lx.html
Original report (archived issue) by John Hsu (Bitbucket: hsu, GitHub: hsu).
Original report (archived issue) by YajingWang (Bitbucket: Yajing_Wang).
I inserted Husky to my world and save it as a new world file, then I load the new world file by a launch file, but it always report the error:
#! [Err] [Plugin.h:153] Failed to load plugin libhusky_gazebo_plugins.so: libhuaky_gazebo_plugins.so : cannot open shared object file : No such file or directory.
I checked the .sdf file of husky and find the description of the plugin:
#!<plugin name="husky_diff_controller" filename="libhusky_gazebo_plugins.so"> <alwaysOn>true</alwaysOn> <updateRate>100.0</updateRate> <backLeftJoint>back_left_joint</backLeftJoint> <backRightJoint>back_right_joint</backRightJoint> <frontLeftJoint>front_left_joint</frontLeftJoint> <frontRightJoint>front_right_joint</frontRightJoint> <wheelSeparation>0.5709</wheelSeparation> <wheelDiameter>0.3555</wheelDiameter> <torque>35</torque> </plugin>
I did my work but did not find any related files, so I am confused. I hope to learn the function of the plugin, so I do not want to just delete this part from the .sdf file.
If any one has ideas of this, please give me some information.
I would be very grateful.
Thanks.
Hi everyone , i want to get a person walking in my gazebo for simulation so , pls if anyone know how to launch it pls show me in the comments thanks in advance
Original report (archived issue) by Thomas Koletschka (Bitbucket: thomasko).
http://gazebosim.org/models/ is out of date - a lot of the recently added / modified models are missing / haven't been updated (e.g. maurice's brick wall and cordless drill).
Also none of the models even load with 1.5, e.g.:
Unable to download model[http://gazebosim.org/models/stop_sign]
Warning [ModelDatabase.cc:550] The manifest.xml for a Gazebo model is deprecated. Please rename manifest.xml to model.config for model ""
Error [ModelDatabase.cc:597] Invalid model manifest file["manifest.xml"]
not sure whether that's a gazebo or gazebo_models issue though, still worked with 1.4.
Original report (archived issue) by Nate Koenig (Bitbucket: Nathan Koenig).
We declined pull request #69 because we ran out of time.
Here are the items to address in the omni_wheel_test_model branch:
Change URDF to SDF with embedded ruby
Add textures to the wheels
Change the python script to a gazebo plugin
Original report (archived issue) by Nate Koenig (Bitbucket: Nathan Koenig).
Make a version of the polaris xp900 without a roll cage.
Original report (archived issue) by Louise Poubel (Bitbucket: chapulina, GitHub: chapulina).
The SDF spec requires that a <script> tag has at least one <uri> child. The husky model doesn't have one though, which means its materials fail to load when using the new SDF API.
IssueForNewDevelopers
Original report (archived issue) by John Hsu (Bitbucket: hsu, GitHub: hsu).
<inertial>
<pose>0.6096 0.00476 1.2192 0 0 0</pose>
<mass>2.5</mass>
<inertia>
<ixx>1.23872608133</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1.548384</iyy>
<iyz>0</iyz>
<izz>0.30969568133</izz>
</inertia>
</inertial>
Original report (archived issue) by Roselle Carmen (Bitbucket: iamironcat).
The original report had attachments: nurse.obj
Posted this on Gazebo Answers and realise it's a bug after reading the issues.
In the same terminal, I set up my path and load a model within that location.
I'm using a model which was able to load on Gazebo when I didn't set up the path. The .sdf (edited the mesh path) is from here.
The terminal gives me the following fail and doesn't launch Gazebo.
gzclient: /usr/include/boost/smart_ptr/shared_ptr.hpp:734: typename boost::detail::sp_member_access<T>::type boost::shared_ptr<T>::operator->() const [with T = gazebo::rendering::Camera; typename boost::detail::sp_member_access<T>::type = gazebo::rendering::Camera*]: Assertion `px != 0' failed.
escalating to SIGKILL on server
I also recieved an Ubuntu crash report after this.
More a question than an issue.
What is the method used to obtain realistic models regarding textures. ( the dumpster model as a typical example )
Is there any reference material or tutorial available ?
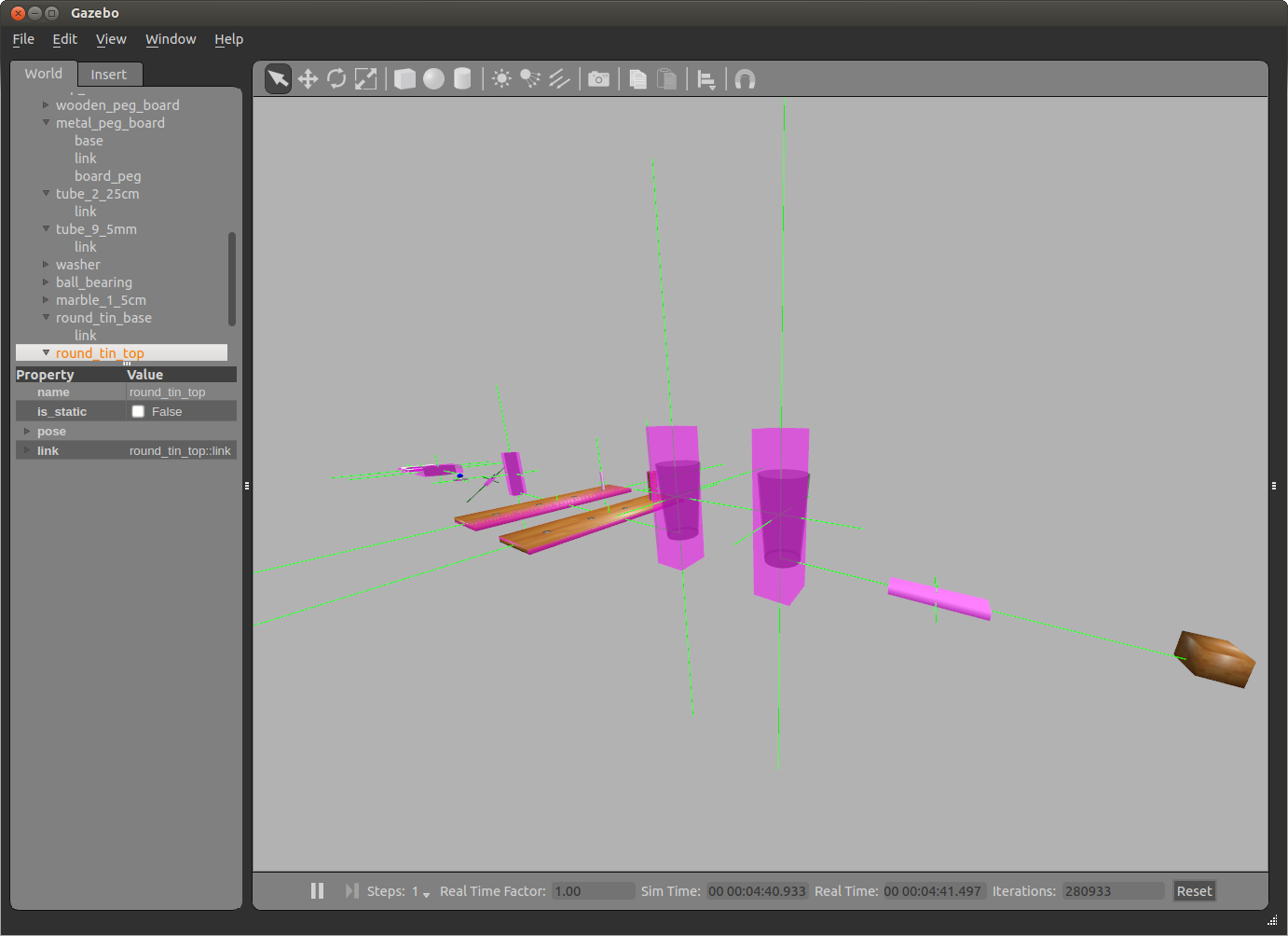
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
Many of the models have incorrect inertial parameters. There is a gazebo feature under development (in branch issue_203) that will enable visualization of moment of inertia to help choose reasonable parameters.
For example, see the following models with the moment of inertia visualized as a box with equivalent inertia and uniform density.
Original report (archived issue) by Anonymous.
Hi,
I am doing a simulation of a crawler vehicle, but I find trouble with building the model. I happened to see a very similar one, but I could not find the description file or the raw model of it. It would be great helpful if I have the chance to learn from this model, so could anyone who have any ideas of it provide me with some information? I would be very grateful.
Here is the picture of the robot:
Original report (archived issue) by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters).
One of the ARAT tasks involves the ball_bearing interacting with the round_tin_* models. In my testing, the ball bearing easily escapes these models.
The ball_bearing has a radius of 3 mm, and the round tins have wall thickness of about 1 mm. We could potentially thicken the walls of the round_tin_* models and/or adjust the contact parameters.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.



{kind=link}
{kind=link}