PyTorch implementation of the paper "Ultra Fast Deep Lane Detection with Hybrid Anchor Driven Ordinal Classification".


Please see INSTALL.md
Please modify the data_root in any configs you would like to run. We will use configs/culane_res18.py as an example.
To train the model, you can run:
python train.py configs/culane_res18.py --log_path /path/to/your/work/dir
or
python -m torch.distributed.launch --nproc_per_node=8 train.py configs/culane_res18.py --log_path /path/to/your/work/dir
It should be noted that if you use different number of GPUs, the learning rate should be adjusted accordingly. The configs' learning rates correspond to 8-GPU training on CULane and CurveLanes datasets. If you want to train on CULane or CurveLanes with single GPU, please decrease the learning rate by a factor of 1/8. On the Tusimple, the learning rate corresponds to single GPU training.
We provide trained models on CULane, Tusimple, and CurveLanes.
| Dataset | Backbone | F1 | Link |
|---|---|---|---|
| CULane | ResNet18 | 75.0 | Google/Baidu |
| CULane | ResNet34 | 76.0 | Google/Baidu |
| Tusimple | ResNet18 | 96.11 | Google/Baidu |
| Tusimple | ResNet34 | 96.24 | Google/Baidu |
| CurveLanes | ResNet18 | 80.42 | Google/Baidu |
| CurveLanes | ResNet34 | 81.34 | Google/Baidu |
For evaluation, run
mkdir tmp
python test.py configs/culane_res18.py --test_model /path/to/your/model.pth --test_work_dir ./tmpSame as training, multi-gpu evaluation is also supported.
mkdir tmp
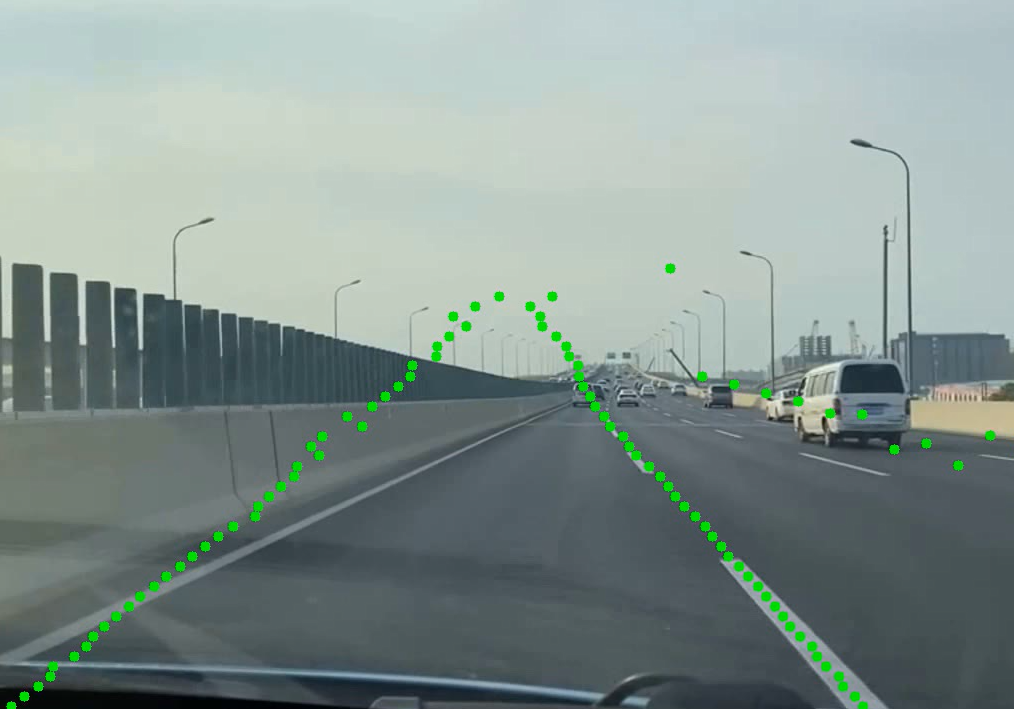
python -m torch.distributed.launch --nproc_per_node=8 test.py configs/culane_res18.py --test_model /path/to/your/model.pth --test_work_dir ./tmpWe provide a script to visualize the detection results. Run the following commands to visualize on the testing set of CULane.
python demo.py configs/culane_res18.py --test_model /path/to/your/culane_res18.pth
We also provide a python script to do tensorrt inference on videos.
-
Convert to onnx model
python deploy/pt2onnx.py --config_path configs/culane_res34.py --model_path weights/culane_res34.pthOr you can download the onnx model using the following script: https://github.com/PINTO0309/PINTO_model_zoo/blob/main/324_Ultra-Fast-Lane-Detection-v2/download.sh. And copy
ufldv2_culane_res34_320x1600.onnxtoweights/ufldv2_culane_res34_320x1600.onnx -
Convert to tensorrt model
Use trtexec to convert engine model
trtexec --onnx=weights/culane_res34.onnx --saveEngine=weights/culane_res34.engine -
Do inference
python deploy/trt_infer.py --config_path configs/culane_res34.py --engine_path weights/culane_res34.engine --video_path example.mp4
@InProceedings{qin2020ultra,
author = {Qin, Zequn and Wang, Huanyu and Li, Xi},
title = {Ultra Fast Structure-aware Deep Lane Detection},
booktitle = {The European Conference on Computer Vision (ECCV)},
year = {2020}
}
@ARTICLE{qin2022ultrav2,
author={Qin, Zequn and Zhang, Pengyi and Li, Xi},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
title={Ultra Fast Deep Lane Detection With Hybrid Anchor Driven Ordinal Classification},
year={2022},
volume={},
number={},
pages={1-14},
doi={10.1109/TPAMI.2022.3182097}
}