My system is Ubuntu 16.04 with ROS Kinetic, and I tried both compiling from source code and installing from binary package, but failed in the same way.
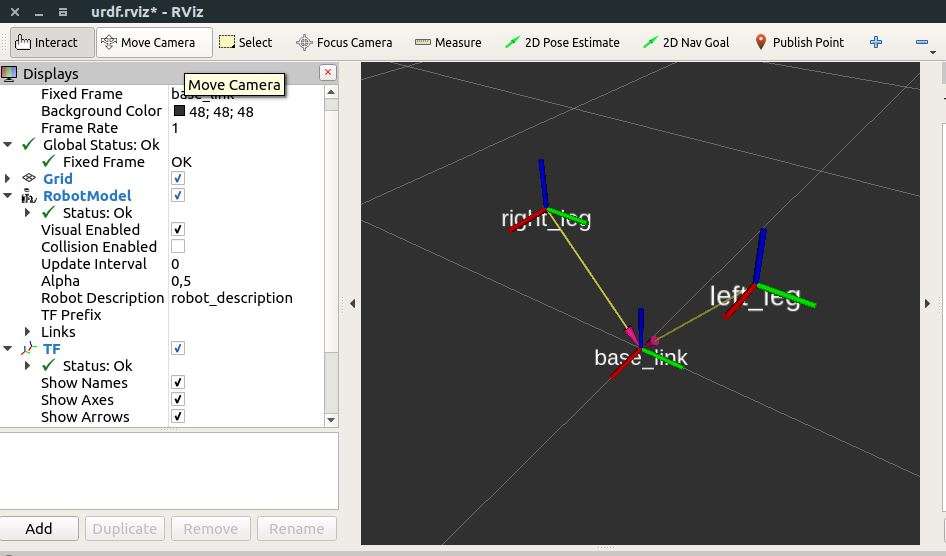
$ roslaunch urdf_tutorial display.launch model:=urdf/05-visual.urdf
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
WARNING: disk usage in log directory [/home/username/.ros/log] is over 1GB.
It's recommended that you use the 'rosclean' command.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro instead
...
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[joint_state_publisher-1]: started with pid [20028]
process[robot_state_publisher-2]: started with pid [20029]
process[rviz-3]: started with pid [20030]
TIFFFieldWithTag: Internal error, unknown tag 0x829a.
TIFFFieldWithTag: Internal error, unknown tag 0x829d.
TIFFFieldWithTag: Internal error, unknown tag 0x8822.
TIFFFieldWithTag: Internal error, unknown tag 0x8824.
TIFFFieldWithTag: Internal error, unknown tag 0x8827.
TIFFFieldWithTag: Internal error, unknown tag 0x8828.
TIFFFieldWithTag: Internal error, unknown tag 0x9000.
TIFFFieldWithTag: Internal error, unknown tag 0x9003.
TIFFFieldWithTag: Internal error, unknown tag 0x9004.
TIFFFieldWithTag: Internal error, unknown tag 0x9101.
TIFFFieldWithTag: Internal error, unknown tag 0x9102.
TIFFFieldWithTag: Internal error, unknown tag 0x9201.
TIFFFieldWithTag: Internal error, unknown tag 0x9202.
TIFFFieldWithTag: Internal error, unknown tag 0x9203.
TIFFFieldWithTag: Internal error, unknown tag 0x9204.
TIFFFieldWithTag: Internal error, unknown tag 0x9205.
TIFFFieldWithTag: Internal error, unknown tag 0x9206.
TIFFFieldWithTag: Internal error, unknown tag 0x9207.
TIFFFieldWithTag: Internal error, unknown tag 0x9208.
TIFFFieldWithTag: Internal error, unknown tag 0x9209.
TIFFFieldWithTag: Internal error, unknown tag 0x920a.
TIFFFieldWithTag: Internal error, unknown tag 0x9214.
TIFFFieldWithTag: Internal error, unknown tag 0x927c.
TIFFFieldWithTag: Internal error, unknown tag 0x9286.
TIFFFieldWithTag: Internal error, unknown tag 0x9290.
TIFFFieldWithTag: Internal error, unknown tag 0x9291.
TIFFFieldWithTag: Internal error, unknown tag 0x9292.
TIFFFieldWithTag: Internal error, unknown tag 0xa000.
TIFFFieldWithTag: Internal error, unknown tag 0xa001.
TIFFFieldWithTag: Internal error, unknown tag 0xa002.
TIFFFieldWithTag: Internal error, unknown tag 0xa003.
TIFFFieldWithTag: Internal error, unknown tag 0xa004.
TIFFFieldWithTag: Internal error, unknown tag 0xa20b.
TIFFFieldWithTag: Internal error, unknown tag 0xa20c.
TIFFFieldWithTag: Internal error, unknown tag 0xa20e.
TIFFFieldWithTag: Internal error, unknown tag 0xa20f.
TIFFFieldWithTag: Internal error, unknown tag 0xa210.
TIFFFieldWithTag: Internal error, unknown tag 0xa214.
TIFFFieldWithTag: Internal error, unknown tag 0xa215.
TIFFFieldWithTag: Internal error, unknown tag 0xa217.
TIFFFieldWithTag: Internal error, unknown tag 0xa300.
TIFFFieldWithTag: Internal error, unknown tag 0xa301.
TIFFFieldWithTag: Internal error, unknown tag 0xa302.
TIFFFieldWithTag: Internal error, unknown tag 0xa401.
TIFFFieldWithTag: Internal error, unknown tag 0xa402.
TIFFFieldWithTag: Internal error, unknown tag 0xa403.
TIFFFieldWithTag: Internal error, unknown tag 0xa404.
TIFFFieldWithTag: Internal error, unknown tag 0xa405.
TIFFFieldWithTag: Internal error, unknown tag 0xa406.
TIFFFieldWithTag: Internal error, unknown tag 0xa407.
TIFFFieldWithTag: Internal error, unknown tag 0xa408.
TIFFFieldWithTag: Internal error, unknown tag 0xa409.
TIFFFieldWithTag: Internal error, unknown tag 0xa40a.
TIFFFieldWithTag: Internal error, unknown tag 0xa40b.
TIFFFieldWithTag: Internal error, unknown tag 0xa40c.
TIFFFieldWithTag: Internal error, unknown tag 0xa407.
TIFFFieldWithTag: Internal error, unknown tag 0xa407.
TIFFFieldWithTag: Internal error, unknown tag 0xa420.
TIFFFieldWithTag: Internal error, unknown tag 0x829a.
TIFFFieldWithTag: Internal error, unknown tag 0x829d.
TIFFFieldWithTag: Internal error, unknown tag 0x8822.
TIFFFieldWithTag: Internal error, unknown tag 0x8824.
TIFFFieldWithTag: Internal error, unknown tag 0x8827.
TIFFFieldWithTag: Internal error, unknown tag 0x8828.
TIFFFieldWithTag: Internal error, unknown tag 0x9000.
TIFFFieldWithTag: Internal error, unknown tag 0x9003.
TIFFFieldWithTag: Internal error, unknown tag 0x9004.
TIFFFieldWithTag: Internal error, unknown tag 0x9101.
TIFFFieldWithTag: Internal error, unknown tag 0x9102.
TIFFFieldWithTag: Internal error, unknown tag 0x9201.
TIFFFieldWithTag: Internal error, unknown tag 0x9202.
TIFFFieldWithTag: Internal error, unknown tag 0x9203.
TIFFFieldWithTag: Internal error, unknown tag 0x9204.
TIFFFieldWithTag: Internal error, unknown tag 0x9205.
TIFFFieldWithTag: Internal error, unknown tag 0x9206.
TIFFFieldWithTag: Internal error, unknown tag 0x9207.
TIFFFieldWithTag: Internal error, unknown tag 0x9208.
TIFFFieldWithTag: Internal error, unknown tag 0x9209.
TIFFFieldWithTag: Internal error, unknown tag 0x920a.
TIFFFieldWithTag: Internal error, unknown tag 0x9214.
TIFFFieldWithTag: Internal error, unknown tag 0x927c.
TIFFFieldWithTag: Internal error, unknown tag 0x9286.
TIFFFieldWithTag: Internal error, unknown tag 0x9290.
TIFFFieldWithTag: Internal error, unknown tag 0x9291.
TIFFFieldWithTag: Internal error, unknown tag 0x9292.
TIFFFieldWithTag: Internal error, unknown tag 0xa000.
TIFFFieldWithTag: Internal error, unknown tag 0xa001.
TIFFFieldWithTag: Internal error, unknown tag 0xa002.
TIFFFieldWithTag: Internal error, unknown tag 0xa003.
TIFFFieldWithTag: Internal error, unknown tag 0xa004.
TIFFFieldWithTag: Internal error, unknown tag 0xa20b.
TIFFFieldWithTag: Internal error, unknown tag 0xa20c.
TIFFFieldWithTag: Internal error, unknown tag 0xa20e.
TIFFFieldWithTag: Internal error, unknown tag 0xa20f.
TIFFFieldWithTag: Internal error, unknown tag 0xa210.
TIFFFieldWithTag: Internal error, unknown tag 0xa214.
TIFFFieldWithTag: Internal error, unknown tag 0xa215.
TIFFFieldWithTag: Internal error, unknown tag 0xa217.
TIFFFieldWithTag: Internal error, unknown tag 0xa300.
TIFFFieldWithTag: Internal error, unknown tag 0xa301.
TIFFFieldWithTag: Internal error, unknown tag 0xa302.
TIFFFieldWithTag: Internal error, unknown tag 0xa401.
TIFFFieldWithTag: Internal error, unknown tag 0xa402.
TIFFFieldWithTag: Internal error, unknown tag 0xa403.
TIFFFieldWithTag: Internal error, unknown tag 0xa404.
TIFFFieldWithTag: Internal error, unknown tag 0xa405.
TIFFFieldWithTag: Internal error, unknown tag 0xa406.
TIFFFieldWithTag: Internal error, unknown tag 0xa407.
TIFFFieldWithTag: Internal error, unknown tag 0xa408.
TIFFFieldWithTag: Internal error, unknown tag 0xa409.
TIFFFieldWithTag: Internal error, unknown tag 0xa40a.
TIFFFieldWithTag: Internal error, unknown tag 0xa40b.
TIFFFieldWithTag: Internal error, unknown tag 0xa40c.
TIFFFieldWithTag: Internal error, unknown tag 0xa407.
TIFFFieldWithTag: Internal error, unknown tag 0xa407.
TIFFFieldWithTag: Internal error, unknown tag 0xa420.