Probably the best one among all GitHub repos.
This repo is under active development. Issues / PRs are welcomed.
- UR5 arm with end-effector 6D IK (Position [X Y Z] and Orientation [R P Y])
- Enhanced Robotiq-85 / 140 gripper, with precise position control and experimental torque control
- Built-in YCB models loader (and obj models after decomposition)
- Gym-styled API, making it suitable for Reinforcement Learning in the field of push-and-grasp
- A heuristic grasping demo
- An interactive user-control demo
- Python 3
- PyBullet
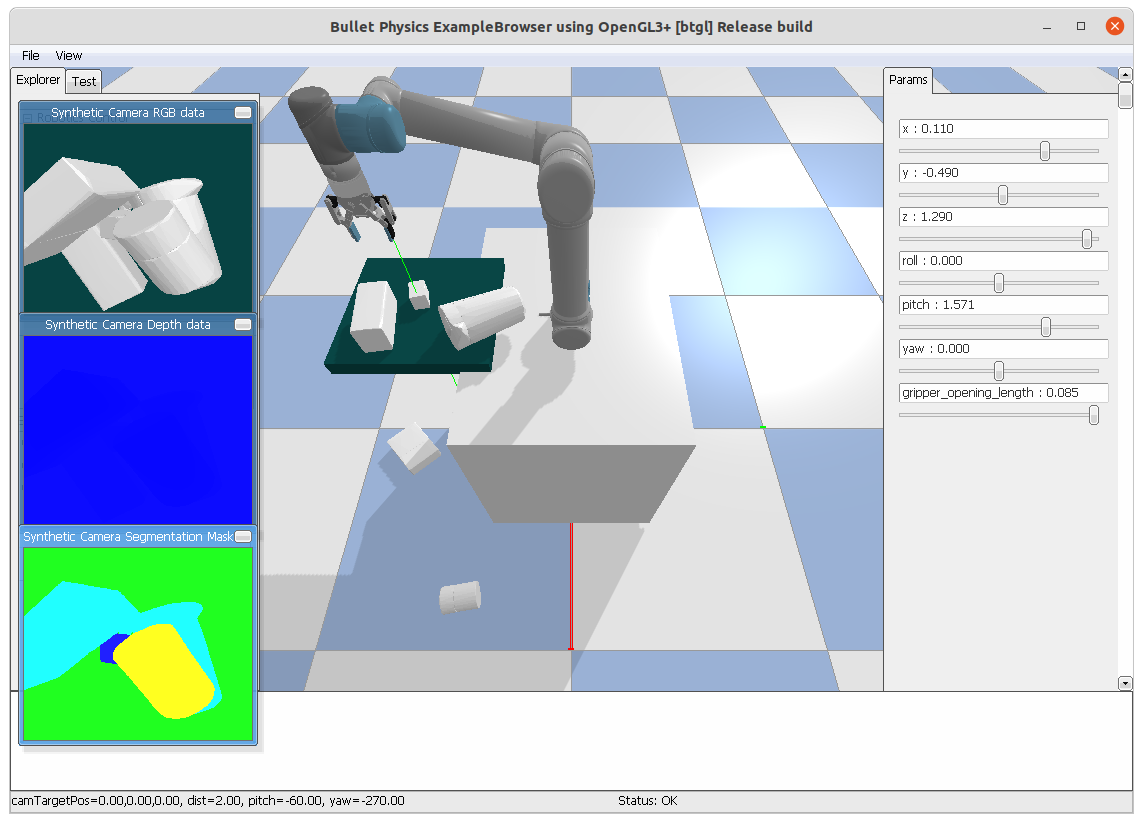
You can try this repo with the interactive user-control demo.
python main.py
You can change the XYZ and RPY of the gripper on the right panel.
Press Z to close the gripper and R to open it.
See heuristic demo in main.py.
https://github.com/matafela/pybullet_grasp_annotator_robotiq_85
https://github.com/zswang666/pybullet-playground
https://github.com/ros-industrial/robotiq
https://github.com/Alchemist77/pybullet-ur5-equipped-with-robotiq-140
I do not claim copyright for any model files under this repo.









































































































