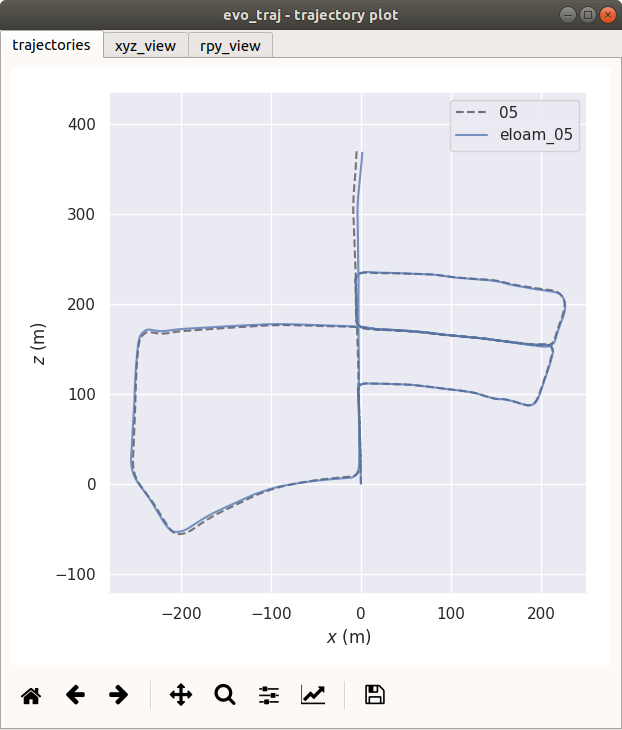
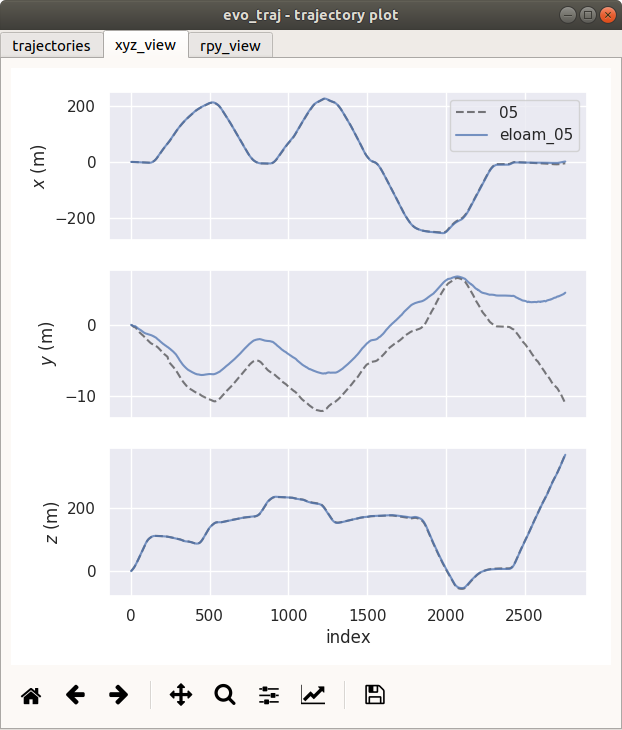
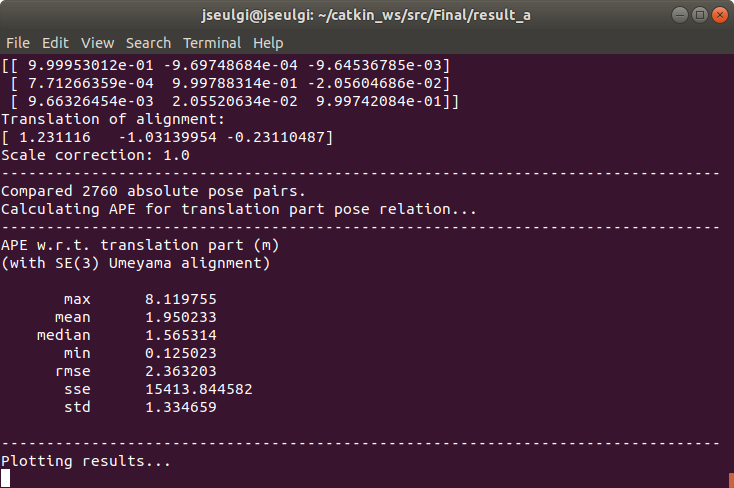
This repository contains modified code of A-LOAM to run and evaluate with kitti-data set. When you run the code, you'll get the trajectory results of A-LOAM in KITTI groundtruth format and you can directly evalutate the result with KITTI gt by EVO-eval kit. A-LOAM already has the kitti helper for kitti-data usage but I found that it has some problem with directories, so I modified it. Wish you find it helpful, especially who are not familiar with ROS and LOAM.
Ubuntu 64-bit 16.04 or 18.04. ROS Kinetic or Melodic. ROS Installation
Follow Ceres Installation.
Follow PCL Installation.
Clone the repository and catkin_make:
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make
source ~/catkin_ws/devel/setup.bash
Download odometry dataset(color or gray, velodyne, calibration, ground truth) from : http://www.cvlibs.net/datasets/kitti/eval_odometry.php and Merge them all in one dataset directory
gedit ~/catkin_ws/src/A-LOAM/launch/kitti_helper.launch
Change 'dataset_folder' and 'output_bag_file' to your own directories
roslaunch kittibag kittibag.launch
gedit ~/catkin_ws/src/A-LOAM/launch/aloam_velodyne_HDL_64.launch
Change 'RESULT_PATH' to your result dir
roslaunch aloam_velodyne aloam_velodyne_HDL_64.launch
rosbag play *.bag --clock
Check and follow this repository
https://github.com/MichaelGrupp/evo