gavinphr / space-time-astar Goto Github PK
View Code? Open in Web Editor NEWA* Search Algorithm with an Additional Time Dimension to Deal with Dynamic Obstacles
License: MIT License
A* Search Algorithm with an Additional Time Dimension to Deal with Dynamic Obstacles
License: MIT License








































































































The LICENSE.txt file ends with a space character.
The image file within the fig directory contains an asterisk.
These make it difficult to check out this repo on Windows, as they are not legal file names.
Hello,
I notice that my agent will avoid the entire obstacle path for the full time interval. Shouldn't it only avoid the obstacle's path at each instant in time?
For example, a simple case that is currently infeasible.
X = dynamic obstacle
G = Goal
A = Agent
O = empty space
Time = 0
OOOOO
AOGOX
OOOOO
Time = 1
OOOOO
OAGXO
OOOOO
What should happen next
Time = 2
OOOOOO
OOGXOO (G and X occupy same pos)
OOAOOO
Time = 3
OOOOOO
OXGAOO (G and A occupy same pos: Finsihed)
OOOOOO
It only matters that the agent avoids colliding with the obstacle at each instant in time. Not for the full trajectory of the obstacle.
I have a matplotlib visualizer I would be happy to share if you believe it would help explain!
@GavinPHR Thank you for your work this is very interesting!
Hi, thanks for the repository. Is it possible to share an example code where trajectory of at least one of the robots is known, along with static obstacle? I am unable to find a good resource on how to use this repository really. Thanks
Can you give me an example about how to use it? I will get a bug when I call this lib.
Consider this example:
grid_size, cell_size, domain_size = 20, 1, 1
static_obstacles = [(0, 0), (10, 8), (10, 10), (10, 12), (12, 12), (grid_size-1, grid_size-1)]
dynamic_obstacles = {}
for seed in (8, 10, 16, 18): # create dynamic obstacles
random.seed(seed)
x0, y0, x1, y1 = [random.randint(2, grid_size-3) for _ in (0, 1, 2, 3)]
start, goal = (x0, y0), (x1, y1)
planner = Planner(cell_size, domain_size, static_obstacles)
path = planner.plan(start, goal, dynamic_obstacles)
for step, coord in enumerate(path):
if step not in dynamic_obstacles:
dynamic_obstacles[step] = []
dynamic_obstacles[step].append(coord)
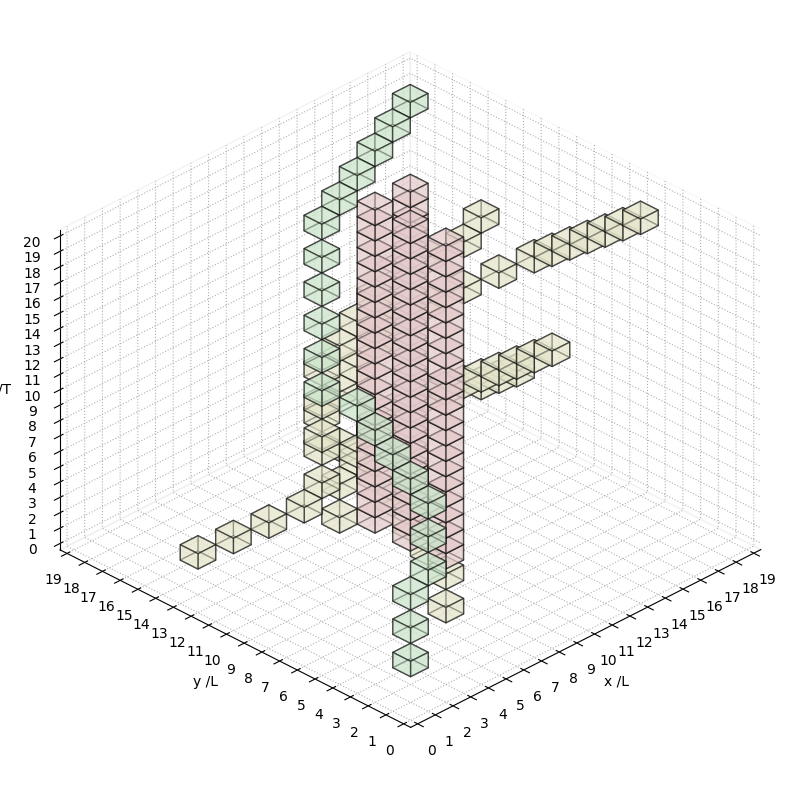
start, goal = (3, 3), (17, 17)
planner = Planner(cell_size, domain_size, static_obstacles)
path = planner.plan(start, goal, dynamic_obstacles, debug=True)
print(path)
Path plan found after 43 iterations (works as expected):
[[3 3] [4 4] [5 5] [6 5] [7 6] [8 7] [8 8] [8 9] [8 10] [8 11] [7 12] [8 13] [9 14] [10 15] [11 16] [12 17] [13 17] [14 17] [15 17] [16 17] [17 17]]
Now I just remove the static obstacle at (10, 10), everything else remains the same:
grid_size, cell_size, domain_size = 20, 1, 1
static_obstacles = [(0, 0), (10, 8), (10, 12), (12, 12), (grid_size-1, grid_size-1)]
dynamic_obstacles = {}
for seed in (8, 10, 16, 18): # create dynamic obstacles
random.seed(seed)
x0, y0, x1, y1 = [random.randint(2, grid_size-3) for _ in (0, 1, 2, 3)]
start, goal = (x0, y0), (x1, y1)
planner = Planner(cell_size, domain_size, static_obstacles)
path = planner.plan(start, goal, dynamic_obstacles)
for step, coord in enumerate(path):
if step not in dynamic_obstacles:
dynamic_obstacles[step] = []
dynamic_obstacles[step].append(coord)
start, goal = (3, 3), (17, 17)
planner = Planner(cell_size, domain_size, static_obstacles)
path = planner.plan(start, goal, dynamic_obstacles, debug=True)
print(path)
Path plan found after 28 iterations (weird things happen at t=8):
[[3 3] [4 4] [5 5] [6 4] [7 5] [8 6] [9 6] [10 6] [11 6] [2 17] [3 17] [4 17] [5 17] [6 17] [7 17] [8 17] [9 17] [10 17] [11 17] [12 17] [13 17] [14 17] [15 17] [16 17] [17 17]]

Any ideas on this?
In a grid map, are static obstacle shapes the corresponding grid? Do the coordinates refer to the coordinates of the center of the obstacle, which is also the center of the grid?
By analyzing the code of the Grid class, the grid map is based on the largest rectangle formed by static obstacles as the boundary. However, in details, there are some small problems in the conversion of coordinates and grids. For example,
grid_size=100minx=0, maxx=1000, x_size= (1000 - 0) // 100 = 10,A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.