Hello, all! I've been trying to implement this filter for the last few days with troublesome results. I know this filter works, given the work by @PaulStoffregen and others who show it working well.
I have convinced myself that there must be something wrong with the scale and/or coordinate system input I'm giving the filter, as the readings from my IMU seem to be correct and stable. If this turns out to be the case, I'll be happy to put in the work to add comments or wiki pages describing the fix.
Here is a printout of the raw readings from my IMU given in x, y, z while sitting on a table:
A: 0.02,-0.02,0.03
G: -0.02,0.03,0.07
M: -0.01,0.04,-0.36
A: 0.02,-0.02,0.02
G: 0.19,0.20,-0.07
M: -0.02,0.04,-0.37
A: 0.03,-0.02,0.01
G: 0.03,0.20,-0.10
M: -0.02,0.04,-0.36
A: 0.02,-0.02,0.03
G: -0.06,0.27,-0.03
M: -0.02,0.04,-0.36
A: 0.01,-0.01,0.03
G: 0.01,0.34,0.18
And here are the values from the filter (the code looks very much like the example included in this repo):
219.,-31.51
219.74,-36.38,-30.93
219.58,-36.56,-30.66
219.71,-36.74,-30.88
219.89,-36.54,-31.17
180.00,-0.36,-0.28
179.99,-0.75,-0.53
180.00,-1.11,-0.80
180.00,-1.42,-1.13
180.01,-1.80,-1.37
180.03,-2.17,-1.64
180.04,-2.54,-1.90
180.05,-2.88,-2.20
180.06,-3.25,-2.46
180.08,-3.62,-2.73
180.09,-4.01,-2.96
180.11,-4.35,-3.25
180.14,-4.69,-3.54
180.16,-5.08,-3.78
180.18,-5.50,-3.96
180.20,-5.89,-4.19
180.22,-6.26,-4.46
180.27,-6.58,-4.76
180.27,-7.03,-4.75
180.31,-7.41,-5.00
180.36,-7.78,-5.27
180.40,-8.13,-5.55
180.46,-8.53,-5.76
180.50,-8.91,-5.98
180.57,-9.26,-6.29
180.63,-9.62,-6.55
180.69,-9.96,-6.83
180.74,-10.33,-7.07
180.78,-10.71,-7.30
180.79,-11.15,-7.26
180.86,-11.49,-7.55
180.94,-11.83,-7.84
180.99,-12.22,-8.04
181.06,-12.53,-8.35
181.12,-12.92,-8.56
181.21,-13.29,-8.81
181.26,-13.67,-9.01
181.35,-14.03,-9.27
181.42,-14.42,-9.46
181.51,-14.78,-9.70
181.60,-15.11,-9.98
181.69,-15.49,-10.21
181.78,-15.86,-10.43
181.88,-16.22,-10.68
181.98,-16.55,-10.95
182.07,-16.93,-11.16
182.17,-17.28,-11.41
182.27,-17.64,-11.63
182.37,-18.02,-11.84
182.50,-18.38,-12.08
182.61,-18.75,-12.31
182.76,-19.05,-12.63
182.89,-19.38,-12.90
183.01,-19.72,-13.16
183.15,-20.03,-13.45
183.25,-20.41,-13.61
# ... A linear growth continues
213.06,-37.41,-30.32
213.31,-37.53,-30.66
213.55,-37.66,-30.96
213.67,-37.58,-30.89
213.66,-37.86,-30.77
213.94,-37.53,-31.05
214.24,-37.47,-31.44
214.44,-37.11,-31.58
214.21,-37.18,-31.03
214.02,-37.39,-30.57
214.19,-36.98,-30.69
214.45,-36.87,-30.92
214.65,-37.01,-31.14
214.73,-37.23,-31.13
214.81,-37.05,-31.04
214.98,-37.12,-31.13
215.06,-37.33,-31.13
215.27,-37.43,-31.33
215.51,-37.56,-31.62
215.62,-37.67,-31.67
215.80,-37.68,-31.78
215.95,-37.77,-31.90
216.23,-37.47,-32.29
216.46,-37.55,-32.57
216.67,-37.68,-32.85
216.70,-37.78,-32.66
216.51,-37.51,-32.22
216.60,-37.71,-32.21
216.46,-37.47,-31.79
216.71,-37.56,-32.10
216.99,-37.50,-32.44
217.14,-37.17,-32.50
216.90,-37.29,-32.00
216.61,-37.27,-31.43
216.67,-37.43,-31.40
216.79,-37.21,-31.46
216.81,-37.46,-31.42
216.85,-37.32,-31.30
217.02,-37.34,-31.46
217.18,-37.27,-31.59
217.31,-37.39,-31.72
217.15,-37.22,-31.30
216.93,-36.94,-30.86
216.97,-36.48,-30.93
217.25,-36.57,-31.36
As mentioned, this is with the IMU laying flat on the table.
This filter is pretty straight-forward in implementation, so I can really only see two areas where things can be going wrong: The coordinate system and the scaling.
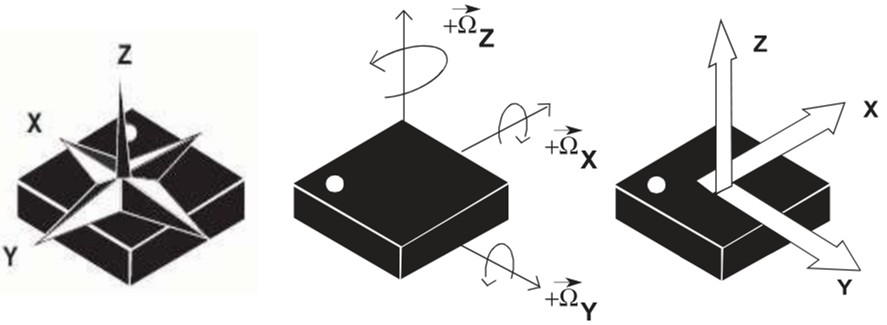
The coordinate system for my IMU is a bit wonky, so I normalized it to a right-handed coordinate system. Here is the coordinate system out of the box:
I tried to keep this short, and I appreciate any time anyone can spend on it. I'm also including the full sketch for context if needed.


![dependabot[bot] avatar](https://avatars.githubusercontent.com/in/29110?v=4 "dependabot[bot]")