jchibane / ndf Goto Github PK
View Code? Open in Web Editor NEWNeural Unsigned Distance Fields (NDF) - Codebase
Neural Unsigned Distance Fields (NDF) - Codebase










































































































Line 106 in 8dd9f59
Hi, jchibane,
In Pytorch document, it's said that grid specifies the sampling pixel locations normalized by the input spatial dimensions. Therefore, it should have most values in the range of [-1, 1]. For example, values x = -1, y = -1 is the left-top pixel of input, and values x = 1, y = 1 is the right-bottom pixel of input.
The range of query points here is [-0.5, 0.5].
Don't we need to normalize the range of query points to [-1,1] here, which means that adding "p = p * 2" before this line?
Best,
Max Lin
Hello,
I hope to do some test on your dataset and compare to the original obj/off models.
The dataset you used contains 5750 objects. However, the dataset I found in the If-Net project is only 3091. And the overlap is roughly 2400.
So could you help to give us the entire dataset or tell us where to download them?
Thank you.
Hi Julian,
Thanks for your sharing. I have two questions regarding the data preprocessing part:
sample_sigmas represents? At the beginning, I thought the boundary_{sigma}_samples.npz file saves the sampled points around the surface with UDF as a Gaussian distribution of mean=0 and std=sigma, but I load some of them and find they are not. Could you explain a little bit about these three files?voxelized_point_cloud_256res_10000points.npz file contains a field called compressed_occupancies which save the occupancy of a 256 * 256 * 256 voxel grid. But I am confused about what is the occupancy of an open surface? Is is just a voxelization of the input sparse point cloud? I think you mentioned in the paper that SDF and occupancy are not well defined for open surfaces.Besides, would you mind share the data preprocessing code? Thanks a lot in advance.
Best,
Xuyang.
Hi @jchibane,
Thanks for this very interesting work and for sharing the code. I am curious about how you trained NDF on large scenes like the Gibson dataset. My understanding is that the scenes are divided into small cubes, and the cubes were used to populate the input grid for training. Assuming my understanding is correct, do you normalize the cubes to [-0.5, 0.5]? Could you please share some detail about the data preparation procedure and training? I would really appreciate it.
Thanks
Hi,
I found that the file
"checkpoint_108h:5m:50s_389150.3971107006.tar"
stroed in "experiments/pretrained_dist-0.01_0.49_0.5_sigmas-0.08_0.02_0.003_res-256/checkpoints" can not been extracted.
I used the command
'tar -xvf checkpoint_108h:5m:50s_389150.3971107006.tar'
but just failed.
Maybe this .tar file has been destroyed, could you update a new file?
Hi Julian,
I am trying to train NDF on other datasets. To generate data for training, I use data processing scripts provided in if-net. However, it seems that the key 'df' in the variable 'boundary_samples_npz' is not computed by if-net.
Could you provide the code of training data generation for NDF? Thanks a lot!
Hi Julian,
Thanks for your excellent work! Could you share the code for computing surface normals as described in Section 3.4 of the paper?
Thank you!
Thank you for your great work.
But in the data.zip there are some data missing compared to the split file you provided(split_cars.npz). There are 5249 1499 749 sequences in split_cars.npz['train'], split_cars.npz['test'], split_cars.npz['val'] separately, but there are only 5750 sequences in the data.zip.
Could you check this up? Than you!
I try to use the preprocessing script boundary sample to compute distance field for the scannet scene, which should be quiet similar to the Gibson dataset. However, I found that some distance field is not correctly computed after visualization (Actually most of the distance field is not computed corrected, for example, query points behind the walls will have weirdly very small distance field). I assume this is caused by reason that libigl is not able to compute the signed distance field on open surface. Therefore, I wonder how the author preprocess the scene data, will be preprocessing script for scene data released in the future?
Thank you in advances!

Line 58 in 570d770

Line 61 in 570d770

Line 56 in 570d770
Line 58 in 570d770
or is
actually referring to
Line 40 in 570d770
What is
Line 58 in 570d770
then?
Can you please clarify?
Hey,
Thank you for your code. The results in Table1 seems pretty good compared to the previous SOTA. Could you share the code of this part?
Best,
Hi,
I am trying to train your model on point cloud, so that i can generate a clean mesh from my rough sparse point cloud. since your model can provide a dense point cloud given a sparse point cloud, and then using Ball Pivoting Algorithm, it should produce a nice clean mesh.
But for data generation we need to compute the distance field, either using igl or pymesh, but for doing so we need a defined mesh, both igl and pymesh ask for faces to be present in the input, which i don't have. how do i solve this problem ?
Hey Julian,
Thank you for your great work!
Cars:
Previously, I have trained NDF on ShapeNet cars. And I found that the learning rate is 1e-6 in your code. In this case the convergence would be affected. It's too slow and the performance is not good. So I alter the learning rate to 1e-4, and that worked out as well as the pre-trained model.
Also the batch_size and the initialization will not affect the performance. Here are the loss value for different BS and lr:
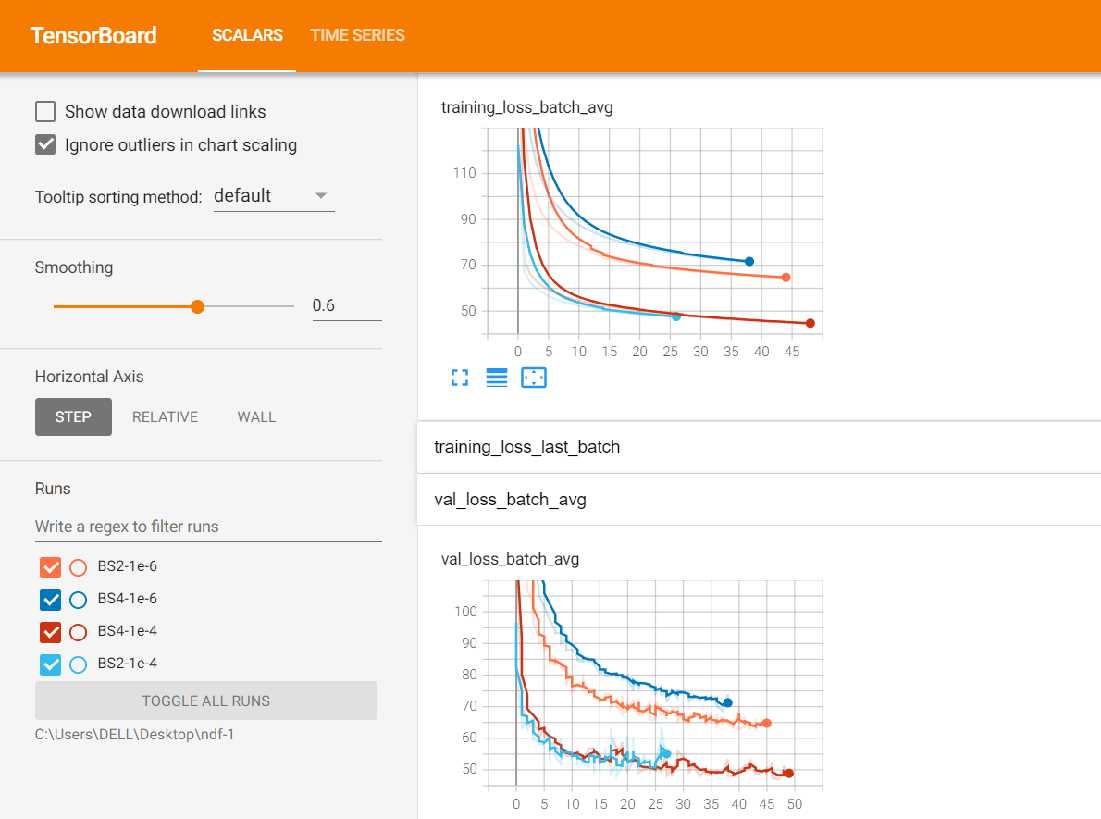
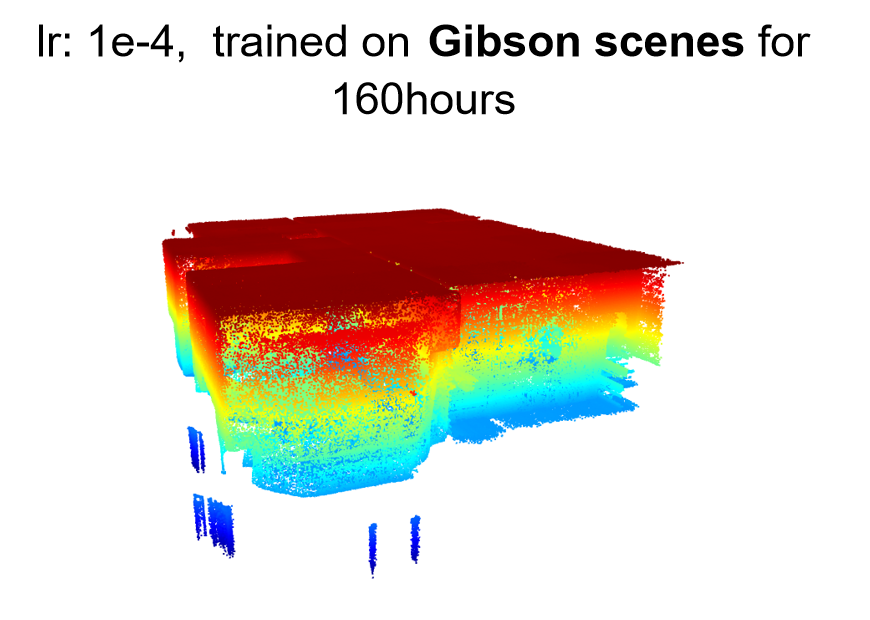
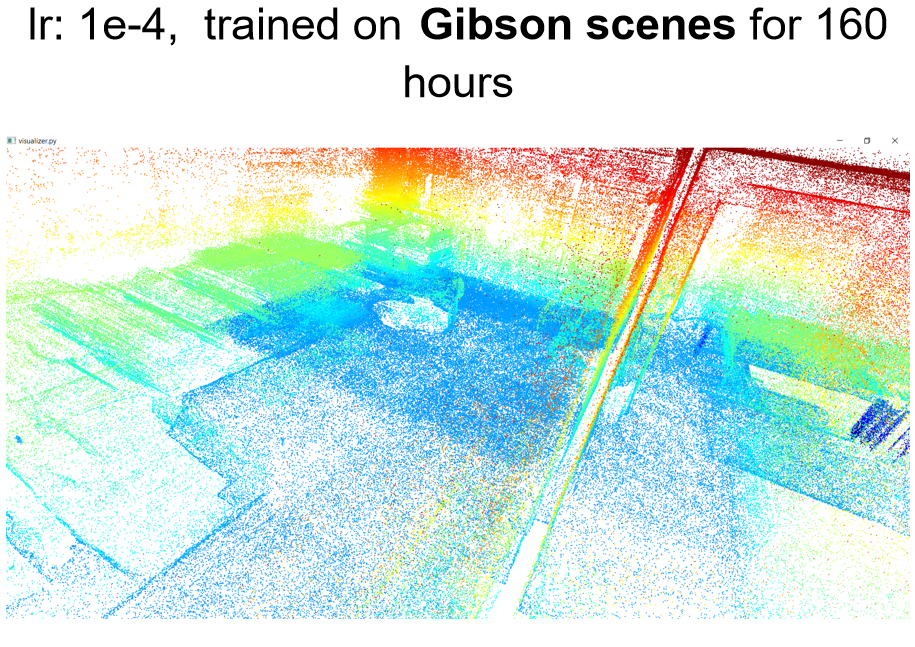
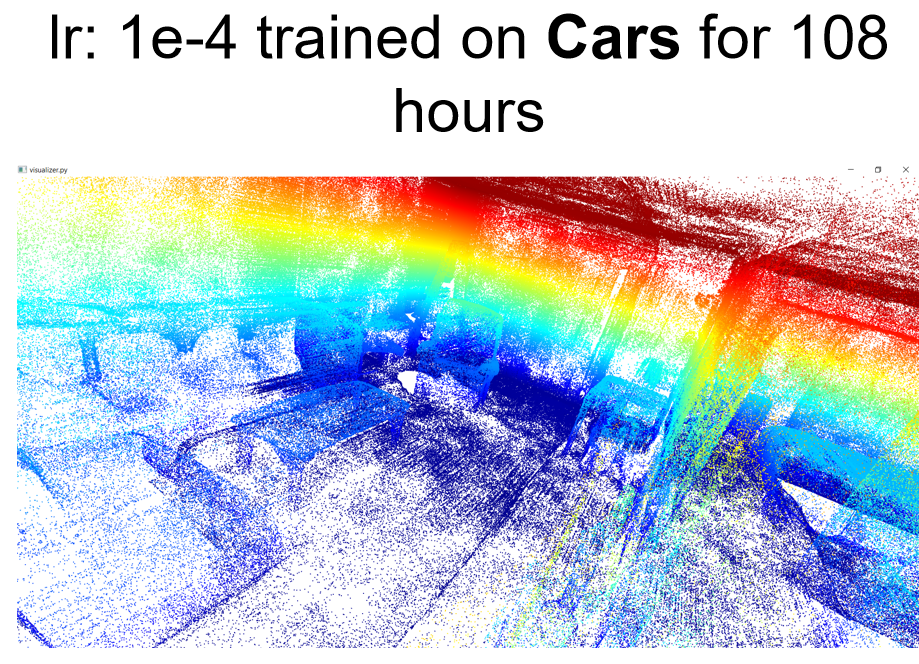
Scenes:
I also tried to use this learning rate 1e-4 for scenes. Looking at the loss value. It's also much better than before. However, the loss value is simply 3~4 times bigger than the loss of cars. I also tried to use your model pre-trained on cars to directly apply to scenes to generalize and it's even better than training on scenes. Please look at the example below:
Loss:
My training settings: Trained for 160 hours, batchsize1 (I think we can only use 1 because the point number in each cube is different), lr 1e-4. Other arguments remaining the same as cars(e.g. threshold). For preprocessing I was just using the script you released in NDF-1 repo and got many cubes for each scene. During training I just adapt the dataloader from Cars, and feed the split cubes into the network one by one (batchsize1), so the steps number in each epoch is the total cubes' number. For cars, the boundary sampled points number fed into the network is 50000, which is a half of the boundary sampled points(100000 sampled from mesh). So I also use 2 strategies to train on scenes, one is using all points in the cube as boundary points input(decoder input), the other one is using a half of them, but both of them did not work well:

Qualitative results:
Questions:
Q1. Do you remember how long it would take to train on scenes? Could you provide a pre-trained model if possible?
Q2. When do you plan to release the code for scenes? Or could you give us a brief introduction or guide line of how to train and test on scenes?
Q3. Have you changed arguments (e.g. thresholds) for training and testing on scenes (e.g. filter_val)? How do you train on scenes? Do you use a batch size 1 using the pre-processed data? Is there any other difference between the training on cars and scenes? (e.g. sample number?)
Q4. In Supplementary, What does this sentence in section 1 Hyperparameters - Network training part: 'To speed up training we initialized all networks with parameters gained by training on the full ShapeNet' means?
(updates: I found that during generation of each cubes' dense point cloud, the gradients produced by the model trained on scenes is not as precise as the one trained on cars. Though, for scenes' model, the df is generally smaller (more points with df < 0.03) at the beginning, after 7 refinement steps, only a small amount of them would have smaller df than before resulting in less points with df<0.009, so the generation will take much more steps and time, which I think is due to the inaccurate gradients because after we move the points along the gradients, the df should be smaller. On the other hand, the cars' model have less points with df<0.03 to begin with, but after 7 refinement steps, almost all of them can be correctly moved closer to the surface, resulting in more points with df<0.009.). I think something's gone wrong during training, it doesn't make sense. The loss is smaller, but the gradient is somehow more inaccurate. It seems like the ground truth might be incorrect, but the only adaption I made is switch pymesh to igl to compute gt_df. That's all.
Q5. Do you use different dense pc generation strategies for cars and scenes? Do you use the same script for both of them?
My method: I generate the scenes by first generating each cube using the same generation script(only decrease sample_num for each cube to ~50000) as cars and then based on the cube corner to stack them together.
However, The iteration for generating the dense point cloud sometimes will be infinite, because after each iteration no new points would fall within the 'filter_val' threshold (you keep those points with df < filter_val after each iteration) So I tried to increase the sample_num for the iteration to 200000 to increase the possibility of selecting correct points, but it did not improve the performance but only to some extent avoid the infinite loop described.
I think there might be 2 reasons:
Hope you can help me, thanks for your time!
Best,
Zhengdi
if we use ball pivoting, we need normal. So we can compute normal via moving least square. However, the normal do not have orientation. The reconstructed mesh might be inconsistent. How to solve this problem. or does rendering really need the normal orientation?
Hi,
i was trying to reproduce the experiment and compare its performance with other methods. However, i didn't find the code to evaluate the reconstruction quality with metrics like CD and F-score. I tried to conduct the evaluation using code provided in another method, but the results are completely wrong with CD being over hundreds!
So, it will be of great help if you can kindly provide the code for evaluation!
Thanks!
Could you please release the code for rendering
I am trying to generate the results that are uploaded under 'ndf/experiments/shapenet_cars_pretrained/evaluation/generation/02958343/' using the provided pre-trained model at the 41st epoch, but the results don't seem to match at all.
Can you kindly specify how many epochs was the model trained for before generating the given results?
Hi,
what does the below line of code do?
ndf/dataprocessing/boundary_sampling.py
Line 38 in 570d770
the X's and Z's are being swapped, but why?
Thank you for your great work!
And it's too slow to download data.zip from nextcloud,could you share another link to download the dataset?
Thanks again!
Hello, Julian,
Thank you for sharing your code. It is a wonderful work.
I am trying to running your code. and meet one issue about data preparation.
I see that in boundary_sampling.py we have this
grid_coords = boundary_points.copy()
grid_coords[:, 0], grid_coords[:, 2] = boundary_points[:, 2], boundary_points[:, 0]
grid_coords = 2 * grid_coords
boundary_points are the points that you mentioned in the paper to compute distance to the surface. Indeed, we see that ground truth df = np.abs(igl.signed_distance(boundary_points, mesh.vertices, mesh.faces)[0]) is distance of boundary_points to the mesh. In theory, we should use boundary_points in training.py
but why do you use grid_coords in the decoder instead of boundary_points shown as follows?
p = batch.get('grid_coords').to(device)
df_gt = batch.get('df').to(device) #(Batch,num_points)
inputs = batch.get('inputs').to(device)
df_pred = self.model(p,inputs) #(Batch,num_points
and why grid_coords switch x and z coordinates, and scaled by 2x ? Grid_coords is misaligned with inputs. right ?
Thanks a lot for your time.
Best regards
Antony
Here is the input mesh, I've sampled 100K points from this for training

Here is the output from model


as you can see there are a lot of patches in the output. the points are not evenly spread out.
what could be the reason for this?
Hi @jchibane ,
Thanks for sharing the amazing work!
We are trying to convert the generated point clouds (under the folder experiments/shapenet_cars_pretrained/evaluation/generation/) to mesh using the ball pivoting algorithm. However, we found that it is very difficult to obtain high-quality meshing results. We use the ball pivoting algorithm provided by MeshLab. When the radius is large, e.g. 0.05, the reconstructed mesh is incomplete. However, if a small radius, e.g. 0.01, is used, though the reconstructed surface is more complete, there exist a lot of artifacts and the surface normals are not consistent.
The results are shown below:
Reconstruction result using radius = 0.05

Reconstruction result using radius = 0.01

Could you provide more details on how you generate mesh from the point cloud? Or could you share your code of point-to-mesh conversion?
Since we are trying to compare your work in our paper, we would like to ensure our comparison is fair.
Thank you for your response in advance!
Hi @jchibane,
Thanks for sharing your work (and nice code btw).
I have some doubts on the point cloud generation algorithm in ndf/models/generation.py.
More precisely:
samples are created in the range [-1.5, 1.5] here; if I understand it correctly, this is because pytorch grid_sample requires the grid coordinates to be in the range [-1, 1] and you add and extra 0.5 because the network was trained with coordinates possibly out of the [-1, 1] rangedf_pred though should be distances predicted by the network for coordinates in the range [-0.5, 0.5] since the udf ground truth is computed here on coordinates belonging to the range [-0.5, 0.5]samples = samples - F.normalize(gradient, dim=2) * df_pred.reshape(-1, 1) here is moving samples in the range [-1.5, 1.5] with udf predictions for the range [-0.5, 0.5]Also: since samples x and z dimensions are not swapped before feeding them to the network (as it is done for training), it seems to me that samples and udf predictions are in a different reference system.
What am I missing?
Thanks in advance!
if we use ball pivoting, we need normal. So we can compute normal via moving least square. However, the normal do not have orientation. The reconstructed mesh might be inconsistent. How to solve this problem. or does rendering really need the normal orientation?

A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.