New Arduino interrupt library, designed for all versions of the Arduino.
Functions:
enableInterrupt- Enables interrupt on a selected Arduino pin. disableInterrupt - Disables interrupt on the selected Arduino pin.
*What's New?
- Wed Sep 4 19:30:45 CDT 2019
- Version 1.1.0 of the library has been released. We add support for the ATmega2561 and 1281 chips, with pinouts defined from the MCUdude/MegaCore project. Code donations by Kizmit99. Plus, a documentation bugfix from Greg Bowler. Thanks, folks!
The EnableInterrupt library is an Arduino interrupt library, designed for 8-bit versions of the Arduino- at this writing, the Uno (and other ATmega328p-based boards, like the mini), Due, Zero, Leonardo (and other ATmega32u4-based boards, like the Micro), the Mega2560 (and other ATmega2560-based boards, like the MegaADK), and for non-Arduino chips: the 644/1284p (Mighty1284, Sodaq Mbili and EnviroDIY Mayfly) ATtiny 44/84, and ATtiny 45/85 (using DA Mellis' support files). The library enables you to assign an interrupt to pins on your chip that support them, and presents a common interface to all supported chips. This means that on the Arduino Uno and Mega you don't give it an interrupt number, as per http://arduino.cc/en/Reference/attachInterrupt. Rather, your first argument is a pin number of a pin that's supported on that chip (see https://github.com/GreyGnome/EnableInterrupt/wiki/Usage#pin--port-bestiary ).
32-bit support for Due comes only in the form of a macro that enables your code to be shared unchanged between 32- and 8-bit Arduinos. No further support for 32-bit Arduinos is planned.
See the https://github.com/GreyGnome/EnableInterrupt/wiki/Download page to download the library.
See the Wiki at https://github.com/GreyGnome/EnableInterrupt/wiki/Home . For detailed usage information see https://github.com/GreyGnome/EnableInterrupt/wiki/Usage .
See the examples subdirectory in the distribution or in this Git site for code examples.
See the extras subdirectory in the distribution or in this Git site for License and Release Notes.
For a tutorial on interrupts, see http://www.engblaze.com/we-interrupt-this-program-to-bring-you-a-tutorial-on-arduino-interrupts/ The posting gets into low-level details on interrupts.
IMPORTANT NOTE: In 0.9.2 I discovered a rather pernicious bug, wherein the library was setting the global interrupt enable bit. This could cause a serious and difficult-to-debug race condition, as it is not the job of the library to manage that bit. The chips come with interrupts enabled so existing code should not be affected, but if you were relying on that behavior note that it has changed. My thanks to http://gammon.com.au/interrupts (the 'How are interrupts queued?' section).
Note that the ATmega processor at the heart of the Arduino Uno/Mega2560/Leonardo/ATmega1284 has two different kinds of interrupts: “external”, and “pin change”. For the list of available interrupt pins and their interrupt types, see the PORT / PIN BESTIARY, below.
There are a varying number of external interrupt pins on the different processors. The Uno supports only 2 and they are mapped to Arduino pins 2 and 3. The 2560 supports 6 usable, the Leonardo supports 5, and the ATmega1284p supports 3. These interrupts can be set to trigger on one of three signal values: RISING, FALLING, or CHANGE (for both), or on LOW level. The triggers are interpreted by hardware, so by the time your user function is running, you know exactly which pin interrupted at the time of the event, and how it changed. On the other hand, as mentioned there are a limited number of these pins.
On the Arduino Uno (and again, all 328p-based boards) and 644/1284-based boards, the pin change interrupts can be enabled on any or all of the pins. The two pins 2 and 3 on 328p-based boards, or three pins (2, 10, and 11) on the 1284-based boards support either pin change or external interrupts. On 2560-based Arduinos, there are 18 pin change interrupt pins in addition to the 6 external interrupt pins. On the Leonardo there are 7 pin change interrupt pins in addition to the 5 external interrupt pins. See PIN BESTIARY below for the pin numbers and other details.
Pin Change interrupts trigger on all RISING and FALLING (ie, "CHANGE") signal edges. Furthermore, the processor's pins, and pin change interrupts, are grouped into “port”s, so for example on the Arduino Uno there are three ports and therefore only 3 interrupt vectors (subroutines) available for the entire body of 20 pin change interrupt pins.
The foregoing means that not only do pin change interrupts trigger on all pin transitions, but a number of pins share a single interrupt subroutine. It's the library's function to make pin change interrupts appear that each pin can support RISING, FALLING, or CHANGE, and each pin can support its own user-defined interrupt subroutine.
When an event triggers an interrupt on any interrupt-enabled pin on a port, a library subroutine ("interrupt handler", "interrupt service routine", or "ISR") attached to that pin's port is triggered. It is up to the EnableInterrupt library to set the proper port to receive interrupts for a pin, to determine what happened when an interrupt is triggered (which pin? ...did the signal rise, or fall?), to handle it properly (Did we care if the signal fell? Did we care if it rose?), then to call the programmer's chosen subroutine (ISR). This makes the job of resolving the action on a single pin somewhat complicated. There is a definitive slowdown in the interrupt routine because of this complication. So there is a significant* time between when the interrupt triggers and when the pins are read to determine what actually happened (rising or falling) and which pin changed. So the signal could have changed by the time the pin's status is read, returning a false reading back to your sketch. Therefore, these pins are not suitable for fast changing signals, and under the right conditions such events as a bouncing switch may actually be missed. Caveat Programmer. If you're concerned about this, continue to read the following information and make sure to read the wiki pages; especially see https://github.com/GreyGnome/EnableInterrupt/wiki/Usage#atmega-processor-interrupt-types . For a further review of this issue see https://github.com/GreyGnome/EnableInterrupt/blob/master/Interrupt%20Timing.pdf
enableInterrupt- Enables interrupt on a selected Arduino pin.
enableInterrupt(uint8_t pinNumber, void (*userFunction)(void), uint8_t mode);
or
enableInterrupt(uint8_t interruptDesignator, void (*userFunction)(void), uint8_t mode);
The arguments are:
* pinNumber - The number of the Arduino pin, such as 3, or A0, or SCK. Note that
these are *not* strings, so when you use A0 for example, do not use quotes.
* interruptDesignator- very much like a pin. See below.
* userFunction - The name of the function you want the interrupt to run. Do not
use a pointer here, just give it the name of your function. See the example code
in the Examples directory.
* mode - What you want the interrupt to interrupt on. For Pin Change Interrupt
pins, the modes supported are RISING, FALLING, or CHANGE.
** RISING - The signal went from "0", or zero volts, to "1", or 5 volts.
** FALLING - The signal went from "1" to "0".
** CHANGE - The signal either rose or fell.
For External Interrupts, the same modes are supported plus the additional mode
of LOW signal level.
** LOW - The signal is at a low level for some time.
Each pin supports only 1 function and 1 mode at a time.disableInterrupt- Disables interrupt on a selected Arduino pin.
disableInterrupt(uint8_t pinNumber);
or
disableInterrupt(uint8_t interruptDesignator);-
interruptDesignator: Essentially this is an Arduino pin, and if that's all you want to give the function, it will work just fine. Why is it called an "interruptDesignator", then? Because there's a twist: You can perform a bitwise "and" with the pin number and PINCHANGEINTERRUPT to specify that you want to use a Pin Change Interrupt type of interrupt on those pins that support both Pin Change and External Interrupts. Otherwise, the library will choose whatever interrupt type (External, or Pin Change) normally applies to that pin, with priority to External Interrupt.
-
The complexity is because of pins 2 and 3 on the ATmega328-based Arduinos, and pins 2, 10, and 11 on 1284-based boards. Those are the only pins on the processors supported by this library that can share External or Pin Change Interrupt types. Otherwise, each pin only supports a single type of interrupt and the PINCHANGEINTERRUPT scheme changes nothing. This means you can ignore this whole discussion for ATmega2560, ATmega32U4, or SAM3X8E (Due)-based Arduinos.
It is possible to change the user function assigned to an interrupt after enabling it (if you want). Later in your code simply disable the interrupt and enable it with a different function.
There is a facility in the library to identify the most recent pin that triggered an interrupt. Set the following definition '''before''' including the EnableInterrupt.h file in your sketch:
#define EI_ARDUINO_INTERRUPTED_PIN
Then, the ATmega chip will set a variable with every interrupt, and you can query it to find which pin interrupted your sketch. The variable is arduinoInterruptedPin and it is of type uint8_t.
See the https://github.com/GreyGnome/EnableInterrupt/wiki/Usage wiki page for more information.
Theoretically pins 0 and 1 (RX and TX) are supported but as these pins have a special purpose on the Arduino, their use in this library has not been tested.
| Interrupt Type | Pins |
|---|---|
| External | 2 3 |
| Pin Change | 2-13 and A0-A5 |
| Interrupt Type | Pins |
|---|---|
| External | 2 3 and 18-21 |
| Pin Change | 10-15 and A8-A15 and SS, SCK, MOSI, MISO |
| Interrupt Type | Pins |
|---|---|
| External | 0-3 and 7 |
| Pin Change | 8-11 and SCK, MOSI, MISO |
| Interrupt Type | Pins |
|---|---|
| External | 2 10 11 |
| Pin Change | 0-31 (aka: 0-23 and A0-A7) |
Interrupt Pins:
Arduino External Arduino Pin Change Arduino Pin Change
Pin Interrupt Pin Interrupt Pin Interrupt
Port Port Port
2 INT0 PD2 2 PCINT18 PD2 A0 PCINT8 PC0
3 INT1 PD3 3 PCINT19 PD3 A1 PCINT9 PC1
4 PCINT20 PD4 A2 PCINT10 PC2
5 PCINT21 PD5 A3 PCINT11 PC3
6 PCINT22 PD6 A4 PCINT12 PC4
7 PCINT23 PD7 A5 PCINT13 PC5
8 PCINT0 PB0
9 PCINT1 PB1
10 PCINT2 PB2
11 PCINT3 PB3
12 PCINT4 PB4
13 PCINT5 PB5
Interrupt pins:
Arduino Arduino
Pin External Pin Pin Change
Interrupt Interrupt
Port Port
3 INT0 PD0 8 PCINT4 PB4
2 INT1 PD1 9 PCINT5 PB5
0 INT2 PD2 10 PCINT6 PB6
1 INT3 PD3 11 PCINT7 PB7
7 INT6 PE6 SCK/15 PCINT1 PB1
MOSI/16 PCINT2 PB2
MISO/14 PCINT3 PB3
on ICSP:
SCK/15: PCINT1 (PB1)
MOSI/16: PCINT2 (PB2)
MISO/14: PCINT3 (PB3)
// Map SPI port to 'new' pins D14..D17
static const uint8_t SS = 17;
static const uint8_t MOSI = 16;
static const uint8_t MISO = 14;
static const uint8_t SCK = 15;
// A0 starts at 18
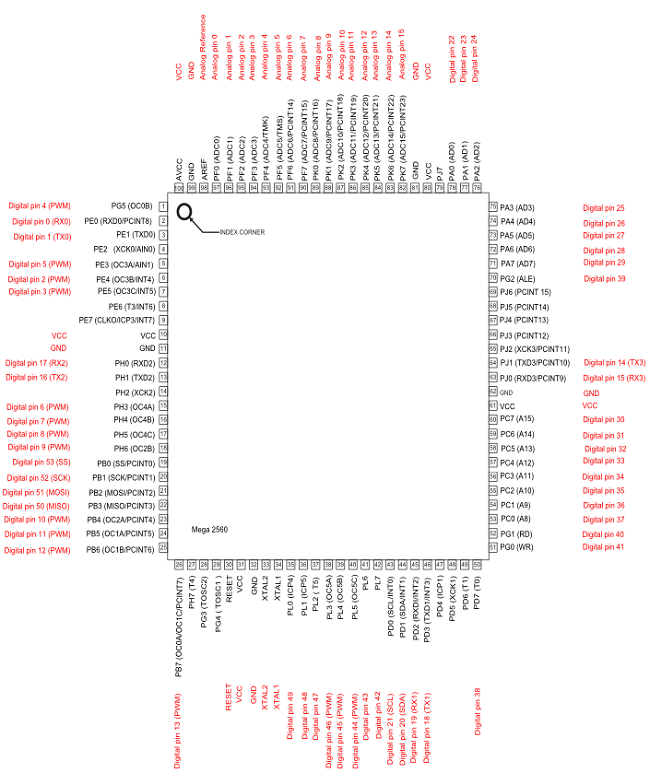
External Interrupts ------------------------------------------------------------ The following External Interrupts are available on the Arduino: Arduino Pin PORT INT ATmega2560 pin 21 PD0 0 43 20 PD1 1 44 19 PD2 2 45 18 PD3 3 46 2 PE4 4 6 3 PE5 5 7 n/c PE6 6 8 (fake pin 75) ** n/c PE7 7 9 (fake pin 76) Pin Change Interrupts ---------------------------------------------------------- ATMEGA2560 Pin Change Interrupts Arduino Arduino Arduino Pin PORT PCINT Pin PORT PCINT Pin PORT PCINT A8 PK0 16 10 PB4 4 SS PB0 0 A9 PK1 17 11 PB5 5 SCK PB1 1 A10 PK2 18 12 PB6 6 MOSI PB2 2 A11 PK3 19 13 PB7 7 MISO PB3 3 A12 PK4 20 14 PJ1 10 A13 PK5 21 15 PJ0 9 A14 PK6 22 0 PE0 8 - this one is a little odd. * A15 PK7 23
The library supports all interrupt pins, even though not all pins to the ATmega-2560 processor are exposed on the Arduino board. These pins are supported as "fake pins", and begin with pin 70 (there are 70 pins on the ATmega 2560 board). The fake pins are as follows:
pin: fake70 PJ2 this is Pin Change Interrupt PCINT11 pin: fake71 PJ3 this is Pin Change Interrupt PCINT12 pin: fake72 PJ4 this is Pin Change Interrupt PCINT13 pin: fake73 PJ5 this is Pin Change Interrupt PCINT14 pin: fake74 PJ6 this is Pin Change Interrupt PCINT15 pin: fake75 PE6 this is External Interrupt INT6 pin: fake76 PE7 this is External Interrupt INT7
- Note: Arduino Pin 0 is PE0 (PCINT8), which is RX0. Also, it is the only other pin on another port on PCI1. This would make it very costly to integrate with the library's code and thus is not supported by this library. It is the same pin the Arduino uses to upload sketches, and it is connected to the FT232RL USB-to-Serial chip (ATmega16U2 on the R3).
External Interrupts ------------------------------------------------------------ The following External Interrupts are available on the Arduino/MegaCore: MegaCore Pin PORT INT ATmega2561/1281 pin 18 PD0 0 25 19 PD1 1 26 20 PD2 2 27 21 PD3 3 28 4 PE4 4 6 5 PE5 5 7 6 PE6 6 8 7 PE7 7 9 Pin Change Interrupts ---------------------------------------------------------- ATMEGA2561/1281 (MegaCore) Pin Change Interrupts MegaCore Pin PORT PCINT 8/SS PB0 0 9/SCK PB1 1 10/MOSI PB2 2 11/MISO PB3 3 12 PB4 4 13 PB5 5 14 PB6 6 15 PB7 7 0 PE0 8 - this one is a little odd. *
- Note: Arduino Pin 0 is PE0 (PCINT8), which is RX0. Also, it is the only other pin on another port on PCI1. This would make it very costly to integrate with the library's code and thus is not supported by this library. It is the same pin the Arduino uses to upload sketches, and it is connected to the FT232RL USB-to-Serial chip (ATmega16U2 on the R3).
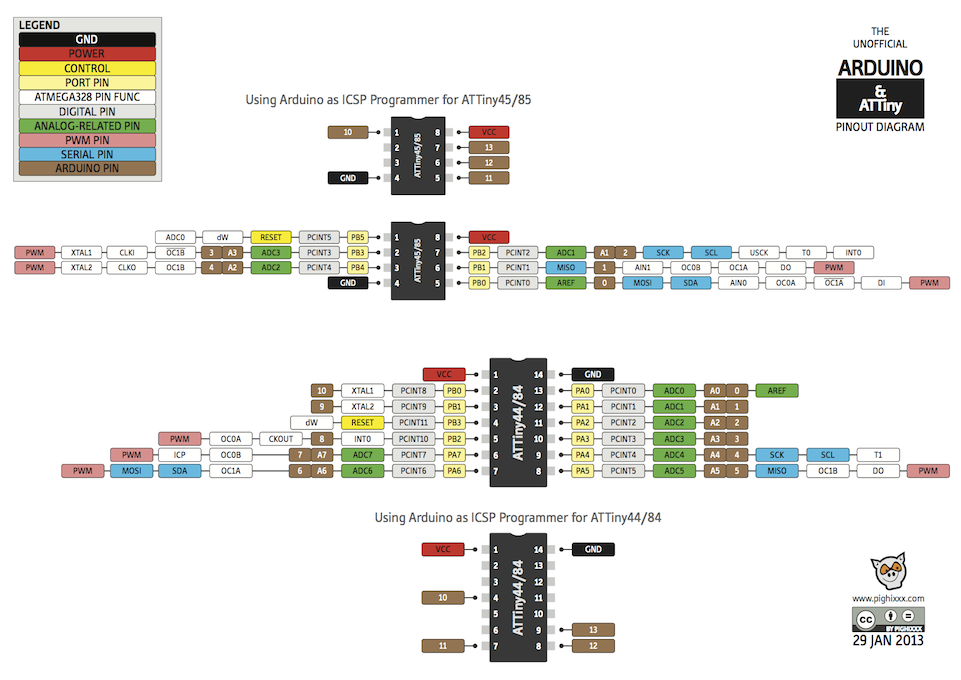
The ATmega 1284p shares pinout with the 644; the only difference is in memory size. We use the "Mighty 1284" platform as our model, because the needed files are mature and complete.
Interrupt Pins:
Mighty External Mighty Mighty
Pin Interrupt Pin* PORT PCINT ATmega644/1284 pin Pin* PORT PCINT ATmega644/1284 pin
Port 0 PB0 8 1 15 PD7 31 21
2 INT2 PB2 1 PB1 9 2 16 PC0 16 22
10 INT1 PD2 2 PB2 2 3 17 PC1 17 23
11 INT0 PD3 3 PB3 11 4 18 PC2 18 24
4 PB4 12 5 19 PC3 19 25
5 PB5 13 6 20 PC4 20 26
6 PB6 14 7 21 PC5 21 27
7 PB7 15 8 22 PC6 22 28
8 PD0 24 14 23 PC7 23 29
9 PD1 25 15 31/A7 PA7 7 33
10 PD2 26 16 30/A6 PA6 6 34
11 PD3 27 17 29/A5 PA5 5 35
12 PD4 28 18 28/A4 PA4 4 36
13 PD5 29 19 27/A3 PA3 3 37
14 PD6 30 20 26/A2 PA2 2 38
25/A1 PA1 1 39
24/A0 PA0 0 40
Bobuino External Bobuino Bobuino
Pin Interrupt Pin* PORT PCINT ATmega644/1284 pin Pin* PORT PCINT ATmega644/1284 pin
Port 4 PB0 8 1 31 PD7 31 21
2 INT2 PB2 5 PB1 9 2 22 PC0 16 22
10 INT1 PD2 6 PB2 2 3 23 PC1 17 23
11 INT0 PD3 7 PB3 11 4 24 PC2 18 24
10 PB4 12 5 25 PC3 19 25
11 PB5 13 6 26 PC4 20 26
12 PB6 14 7 27 PC5 21 27
13 PB7 15 8 28 PC6 22 28
0 PD0 24 14 29 PC7 23 29
1 PD1 25 15 14/A0 PA7 7 33
2 PD2 26 16 15/A1 PA6 6 34
3 PD3 27 17 16/A2 PA5 5 35
30 PD4 28 18 17/A3 PA4 4 36
8 PD5 29 19 18/A4 PA3 3 37
9 PD6 30 20 19/A5 PA2 2 38
20/A6 PA1 1 39
21/A7 PA0 0 40
Mayfly Mayfly Mayfly
Mbili External Mbili Mbili
Pin Interrupt Pin* PORT PCINT ATmega644/1284 pin Pin* PORT PCINT ATmega644/1284 pin
Port 8 PB0 8 1 7 PD7 31 21
2 INT2 PB2 9 PB1 9 2 16 PC0 16 22
10 INT1 PD2 10 PB2 2 3 17 PC1 17 23
11 INT0 PD3 11 PB3 11 4 18 PC2 18 24
12 PB4 12 5 19 PC3 19 25
13 PB5 13 6 20 PC4 20 26
14 PB6 14 7 21 PC5 21 27
15 PB7 15 8 22 PC6 22 28
0 PD0 24 14 23 PC7 23 29
1 PD1 25 15 31/A7 PA7 7 33
2 PD2 26 16 30/A6 PA6 6 34
3 PD3 27 17 29/A5 PA5 5 35
4 PD4 28 18 28/A4 PA4 4 36
5 PD5 29 19 27/A3 PA3 3 37
6 PD6 30 20 26/A2 PA2 2 38
25/A1 PA1 1 39
24/A0 PA0 0 40
# Thanks!
Thank you for downloading and enjoying the EnableInterrupt library.
I hope you find it useful. Heck, I wrote it for you- yeah, that's right- you.
The Maker and/or Geek sitting before your project and trying to make little
computers do fun stuff. It's not easy, and my hat goes off to you. I hope I've
made stuff a little easier for you.
This software would not be nearly as useful as it is without the help of the following people:
Thanks to Loranzo Cafaro for his switch debounce example, to Jevon Wild for his changes to make the library more functional with PlatformIO (http://docs.platformio.org/en/latest/what-is-platformio.html), Ricardo JL Rufino for some PlatformIO fixes to the library.json file, and Sara Damiano for adding support for the Sodaq Mbili and EnviroDIY Mayfly.
And, from the past, this library's predecessor was the PinChangeInt library. I have done a complete rewrite and not used any of its code, but I learned a lot by doing the previous one and I feel like I still owe a debt of gratitude to all the geeks who created/contributed/helped/debugged. So without further ado, I present the "ACKNOWLEDGEMENTS" section from the previous library. Note that "this" library in the following refers to PinChangeInt:
This library was originally written by Chris J. Kiick, Robot builder and all around geek, who said of it, "Hi, Yeah, I wrote the original PCint library. It was a bit of a hack and the new one has better features. I intended the code to be freely usable. Didn't really think about a license. Feel free to use it in your code: I hereby grant you permission." Thanks, Chris! A hack? I dare say not, if I have taken this any further it's merely by standing on the shoulders of giants. This library was the best "tutorial" I found on Arduino Pin Change Interrupts and because of that I decided to continue to maintain and (hopefully) improve it. We, the Arduino community of robot builders and geeks, owe you a great debt of gratitude for your hack- a hack in the finest sense.
The library was then picked up by Lex Talionis, who created the Google Code website. We all owe a debt of thanks to Lex, too, for all his hard work! He is currently the other official maintainer of this code.
Many thanks to all the contributors who have contributed bug fixes, code, and suggestions to this project:
John Boiles and Baziki (who added fixes to PcInt), Maurice Beelen, nms277, Akesson Karlpetter, and Orly Andico for various fixes to this code, Rob Tillaart for some excellent code reviews and nice optimizations, Andre' Franken for a good bug report that kept me thinking, cserveny.tamas a special shout out for providing the MEGA code to PinChangeInt, and Pat O'Brien for testing and reporting on the Arduino Yun.- Thanks!
A HUGE thanks to JRHelbert for fixing the PJ0 and PJ1 interrupt PCMSK1 issue on the Mega... 06/2014
A HUGE thanks to Jan Baeyens ("jantje"), who has graciously DONATED an Arduino Mega ADK to the PinChangeInt project!!! Wow, thanks Jan! This makes the 2560-based Arduino Mega a first class supported platform- I will be able to test it and verify that it works.
-
In 2018, Alex Reinert contributed Bobuino support. Thanks, Alex!
-
In 4/2019 Kizmit99 contributed support for the ATmega2561 and 1281 chips, with pinouts defined from the MCUdude/MegaCore project. Thanks, Kizmit99!
-
In 8/2019 Greg Bowler helped suss out a documentation bug, and contributed a patch to make the README.md less confusing. Much appreciated.
Finally, a shout out to Leonard Bernstein. I was inspired by him (https://www.youtube.com/watch?feature=player_detailpage&v=R9g3Q-qvtss#t=1160) from a Ted talk by Itay Talgam. None of the contributors, myself included, has any interest in making money from this library and so I decided to free up the code as much as possible for any purpose. ...But! You must give credit where credit is due (it's not only a nice idea, it's the law- as in, the license terms)!
"If you love something, give it away."
I apologize if I have forgotten anyone here. Please let me know if so.








































































































































{kind=link}
{kind=link}