![]()


A command-line tool to convert polygon meshes to (annotated) voxel grids.
- Supported input formats: .ply, .off, .obj, .3DS, .SM and RAY
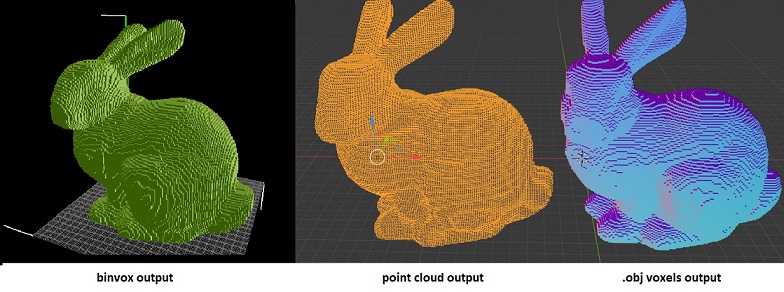
- Supported output formats: .vox, .binvox, .obj cubes and point cloud, morton ordered grid
- Requires a CUDA-compatible video card. Compute Capability 2.0 or higher (Nvidia Fermi or better).
- Since v0.4.4, the voxelizer reverts to a (slower) CPU voxelization method when no CUDA device is found
Important: In v0.6 I replaced all GLM math types with builtin CUDA types, removing an external dependency. This is a big change. I've tested the release as well as I can, but if you encounter any weirdness, it's advised to check if you can reproduce the problem with an older version. Thanks!
Program options:
-f <path to model file>: (required) A path to a polygon-based 3D model file.-s <voxel grid length>: (default: 256) The length of the cubical voxel grid. The process will construct the tightest possible cubical bounding box around the input model.-o <output format>: The output format for voxelized models, default: binvox. Output files are saved in the same folder as the input file, in the format<original file name>_<grid_size>.extension.vox: (default) A vox file, which is the native format of and can be viewed with the excellent MagicaVoxel.binvox: A binvox file. Can be viewed using viewvox.obj: A mesh containing actual cubes (made up of triangle faces) for each voxel.obj_points: A mesh containing a point cloud, with a vertex for each voxel. Can be viewed using any compatible viewer that can just display vertices, like Blender or Meshlab.morton: a binary file containing a Morton-ordered grid. This is an internal format I use for other tools.
-cpu: Force multi-threaded voxelization on the CPU instead of GPU. Can be used when a CUDA device is not detected/compatible, or for very small models where GPU call overhead is not worth it.-solid: (Experimental) Use solid voxelization instead of voxelizing the mesh faces. Needs a watertight input mesh.
cuda_voxelizer -f bunny.ply -s 256 generates a 256 x 256 x 256 vox-based voxel model which will be stored in bunny_256.vox.
cuda_voxelizer -f torus.ply -s 64 -o obj -solid generates a solid (filled) 64 x 64 x 64 .obj voxel model which will be stored in torus_64.obj.
The build process is aimed at 64-bit executables. It's possible to build for 32-bit as well, but I'm not actively testing/supporting this. You can build using CMake or using the provided Visual Studio project. Since 2022, cuda_voxelizer builds via Github Actions as well, check the .yml config file for more info.
The project has the following build dependencies:
- Nvidia Cuda 8.0 Toolkit (or higher) for CUDA
- Trimesh2 for model importing. Latest version recommended.
- OpenMP for multi-threading.
After installing dependencies, do mkdir build and cd build, followed by:
For Windows with Visual Studio:
$env:CUDAARCHS="your_cuda_compute_capability"
cmake -A x64 -DTrimesh2_INCLUDE_DIR:PATH="path_to_trimesh2_include" -DTrimesh2_LINK_DIR:PATH="path_to_trimesh2_library_dir" .. For Linux:
CUDAARCHS="your_cuda_compute_capability" cmake -DTrimesh2_INCLUDE_DIR:PATH="path_to_trimesh2_include" -DTrimesh2_LINK_DIR:PATH="path_to_trimesh2_library_dir" -DCUDA_ARCH:STRING="your_cuda_compute_capability" .. Where your_cuda_compute_capability is a string specifying your CUDA architecture (more info here and here CMake). For example: CUDAARCHS="50;61" or CUDAARCHS="60".
Finally, run
cmake --build . --parallel number_of_cores
A project solution for Visual Studio 2022 is provided in the msvc folder. It is configured for CUDA 12.1, but you can edit the project file to make it work with other CUDA versions. You can edit the custom_includes.props file to configure the library locations, and specify a place where the resulting binaries should be placed.
<TRIMESH_DIR>C:\libs\trimesh2\</TRIMESH_DIR>
<GLM_DIR>C:\libs\glm\</GLM_DIR>
<BINARY_OUTPUT_DIR>D:\dev\Binaries\</BINARY_OUTPUT_DIR>
cuda_voxelizer implements an optimized version of the method described in M. Schwarz and HP Seidel's 2010 paper Fast Parallel Surface and Solid Voxelization on GPU's. The morton-encoded table was based on my 2013 HPG paper Out-Of-Core construction of Sparse Voxel Octrees and the work in libmorton.
cuda_voxelizer is built with a focus on performance. Usage of the routine as a per-frame voxelization step for real-time applications is viable. These are the voxelization timings for the Stanford Bunny Model (1,55 MB, 70k triangles).
- This is the voxelization time for a non-solid voxelization. No I/O - from disk or to GPU - is included in this timing.
- CPU voxelization time is heavily dependent on how many cores your CPU has - OpenMP allocates 1 thread per core.
| Grid size | GPU (GTX 1050 TI) | CPU (Intel i7 8750H, 12 threads) |
|---|---|---|
| 64³ | 0.2 ms | 39.8 ms |
| 128³ | 0.3 ms | 63.6 ms |
| 256³ | 0.6 ms | 118.2 ms |
| 512³ | 1.8 ms | 308.8 ms |
| 1024³ | 8.6 ms | 1047.5 ms |
| 2048³ | 44.6 ms | 4147.4 ms |
- The MagicaVoxel I/O was implemented using MagicaVoxel File Writer by aiekick.
- Thanks to conceptclear for implementing solid voxelization.
- The .binvox file format was created by Michael Kazhdan.
- Patrick Min wrote some interesting tools to work with it:
- binvox-rw-py is a Python module to interact with .binvox files
- Zarbuz's FileToVox looks interesting as well
- If you want a good customizable CPU-based voxelizer, I can recommend VoxSurf.
- Another hackable voxel viewer is Sean Barrett's excellent stb_voxel_render.h.
- Nvidia also has a voxel library called GVDB, that does a lot more than just voxelizing.
This is on my list of "nice things to add".
- Better output filename control
- Noncubic grid support
- Memory limits test
- Implement partitioning for larger models
- Do a pre-pass to categorize triangles
- Implement capture of normals / color / texture data
If you use cuda_voxelizer in your published paper or other software, please reference it, for example as follows:
@Misc{cudavoxelizer17,
author = "Jeroen Baert",
title = "Cuda Voxelizer: A GPU-accelerated Mesh Voxelizer",
howpublished = "\url{https://github.com/Forceflow/cuda_voxelizer}",
year = "2017"}
If you end up using cuda_voxelizer in something cool, drop me an e-mail: mail (at) jeroen-baert.be
cuda_voxelizer is developed in my free time. If you want to support the project, you can do so through:
- Kofi
- BTC: 3GX3b7BZK2nhsneBG8eTqEchgCQ8FDfwZq
- ETH: 0x7C9e97D2bBC2dFDd93EF56C77f626e802BA56860




































































































































