python-periphery is a pure Python library for GPIO, LED, PWM, SPI, I2C, MMIO, and Serial peripheral I/O interface access in userspace Linux. It is useful in embedded Linux environments (including Raspberry Pi, BeagleBone, etc. platforms) for interfacing with external peripherals. python-periphery is compatible with Python 2 and Python 3, is written in pure Python, and is MIT licensed.
Using Lua or C? Check out the lua-periphery and c-periphery projects.
Contributed libraries: java-periphery, dart_periphery
With pip:
pip install python-periphery
With easy_install:
easy_install python-periphery
With setup.py:
git clone https://github.com/vsergeev/python-periphery.git
cd python-periphery
python setup.py install
from periphery import GPIO
# Open GPIO /dev/gpiochip0 line 10 with input direction
gpio_in = GPIO("/dev/gpiochip0", 10, "in")
# Open GPIO /dev/gpiochip0 line 12 with output direction
gpio_out = GPIO("/dev/gpiochip0", 12, "out")
value = gpio_in.read()
gpio_out.write(not value)
gpio_in.close()
gpio_out.close()from periphery import LED
# Open LED "led0" with initial state off
led0 = LED("led0", False)
# Open LED "led1" with initial state on
led1 = LED("led1", True)
value = led0.read()
led1.write(value)
# Set custom brightness level
led1.write(led1.max_brightness / 2)
led0.close()
led1.close()from periphery import PWM
# Open PWM chip 0, channel 10
pwm = PWM(0, 10)
# Set frequency to 1 kHz
pwm.frequency = 1e3
# Set duty cycle to 75%
pwm.duty_cycle = 0.75
pwm.enable()
# Change duty cycle to 50%
pwm.duty_cycle = 0.50
pwm.close()from periphery import SPI
# Open spidev1.0 with mode 0 and max speed 1MHz
spi = SPI("/dev/spidev1.0", 0, 1000000)
data_out = [0xaa, 0xbb, 0xcc, 0xdd]
data_in = spi.transfer(data_out)
print("shifted out [0x{:02x}, 0x{:02x}, 0x{:02x}, 0x{:02x}]".format(*data_out))
print("shifted in [0x{:02x}, 0x{:02x}, 0x{:02x}, 0x{:02x}]".format(*data_in))
spi.close()from periphery import I2C
# Open i2c-0 controller
i2c = I2C("/dev/i2c-0")
# Read byte at address 0x100 of EEPROM at 0x50
msgs = [I2C.Message([0x01, 0x00]), I2C.Message([0x00], read=True)]
i2c.transfer(0x50, msgs)
print("0x100: 0x{:02x}".format(msgs[1].data[0]))
i2c.close()from periphery import MMIO
# Open am335x real-time clock subsystem page
rtc_mmio = MMIO(0x44E3E000, 0x1000)
# Read current time
rtc_secs = rtc_mmio.read32(0x00)
rtc_mins = rtc_mmio.read32(0x04)
rtc_hrs = rtc_mmio.read32(0x08)
print("hours: {:02x} minutes: {:02x} seconds: {:02x}".format(rtc_hrs, rtc_mins, rtc_secs))
rtc_mmio.close()
# Open am335x control module page
ctrl_mmio = MMIO(0x44E10000, 0x1000)
# Read MAC address
mac_id0_lo = ctrl_mmio.read32(0x630)
mac_id0_hi = ctrl_mmio.read32(0x634)
print("MAC address: {:04x}{:08x}".format(mac_id0_lo, mac_id0_hi))
ctrl_mmio.close()from periphery import Serial
# Open /dev/ttyUSB0 with baudrate 115200, and defaults of 8N1, no flow control
serial = Serial("/dev/ttyUSB0", 115200)
serial.write(b"Hello World!")
# Read up to 128 bytes with 500ms timeout
buf = serial.read(128, 0.5)
print("read {:d} bytes: _{:s}_".format(len(buf), buf))
serial.close()Documentation is hosted at https://python-periphery.readthedocs.io.
To build documentation locally with Sphinx, run:
cd docs
make html
Sphinx will produce the HTML documentation in docs/_build/html/.
Run make help to see other output targets (LaTeX, man, text, etc.).
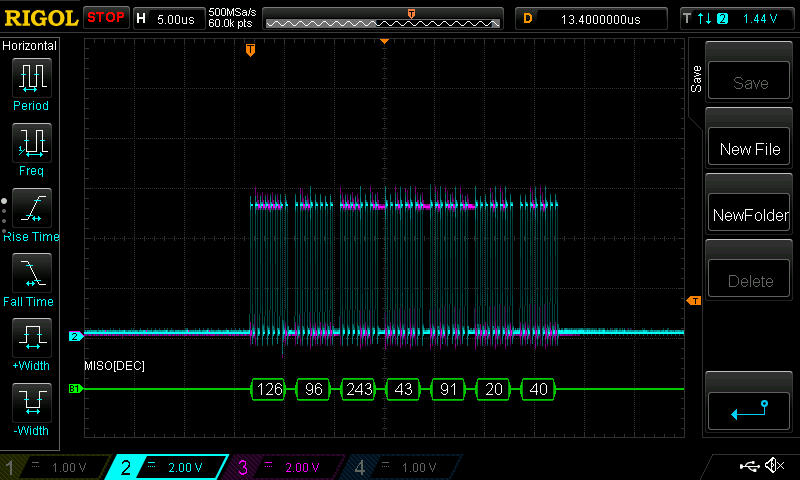
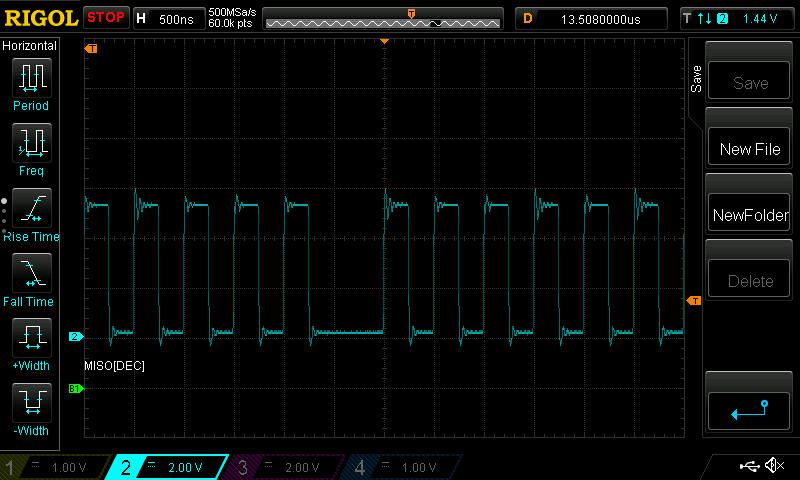
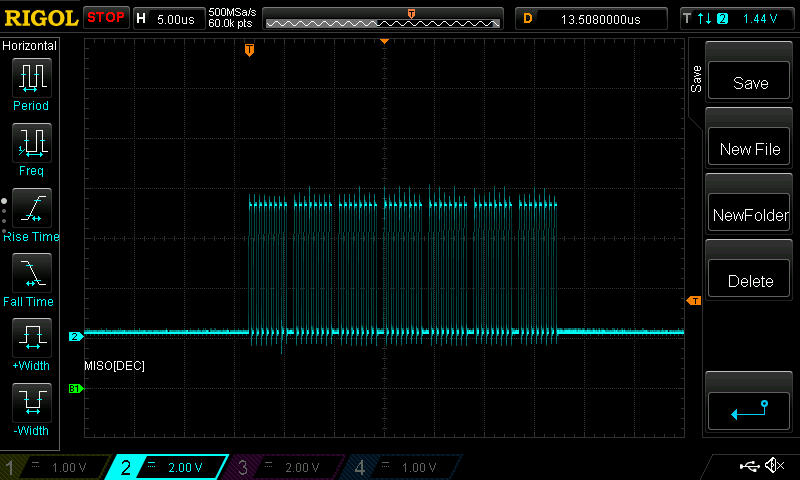
The tests located in the tests folder may be run under Python to test the correctness and functionality of python-periphery. Some tests require interactive probing (e.g. with an oscilloscope), the installation of a physical loopback, or the existence of a particular device on a bus. See the usage of each test for more details on the required setup.
python-periphery is MIT licensed. See the included LICENSE file.