Copyright (c) 2018 NVIDIA Corporation. All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
- Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
- Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
- Neither the name of NVIDIA CORPORATION nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS ``AS IS'' AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Welcome to NVIDIA's PhysX and APEX SDK source code repository. This depot includes the PhysX SDK, the APEX SDK, and the Kapla Demo application.
NOTE: The APEX SDK is not needed to build either the PhysX SDK nor the demo and has been deprecated. It is provided for continued support of existing applications only. We recommend the following libraries as replacements:
For APEX Clothing: NvCloth - https://github.com/NVIDIAGameWorks/NvCloth
For APEX Destruction: Blast - https://github.com/NVIDIAGameWorks/Blast
For APEX Particles: Flex - https://github.com/NVIDIAGameWorks/FleX
For APEX Turbulence: Flow - https://github.com/NVIDIAGameWorks/Flow
Online Documentation:
http://gameworksdocs.nvidia.com/simulation.html
The documentation can also be found in the repository under
- \PhysX_3.4\Documentation
- \APEX_1.4\docs
Please also see the following readme files:
- \PhysX_3.4\readme_*.html,
- \APEX_1.4\readme.txt.
To begin, clone this repository onto your local drive.
To build PhysX and APEX SDKs:
(1) Build PhysX SDK by opening one of the solutions found under PhysX_3.4\Source\compiler. Supported platforms: Windows, Linux, OSX, Android, iOS.
(2) The APEX SDK distribution contains pre-built binaries supporting GPU acceleration. Re-building the APEX SDK removes support for GPU acceleration. The solutions can be found under APEX_1.4\compiler. Supported platforms: Windows, Linux, Android.
To build PhysX Snippets: open one of the solutions found under \PhysX_3.4\Snippets\compiler.
To build PhysX Samples (windows only): open one of the solutions found under \PhysX_3.4\Samples\compiler.
To build APEX Snippets: open one of the solutions found under \APEX_1.4\snippets\compiler.
To build APEX Samples: open one of the solutions found under \APEX_1.4\samples_v2\compiler.
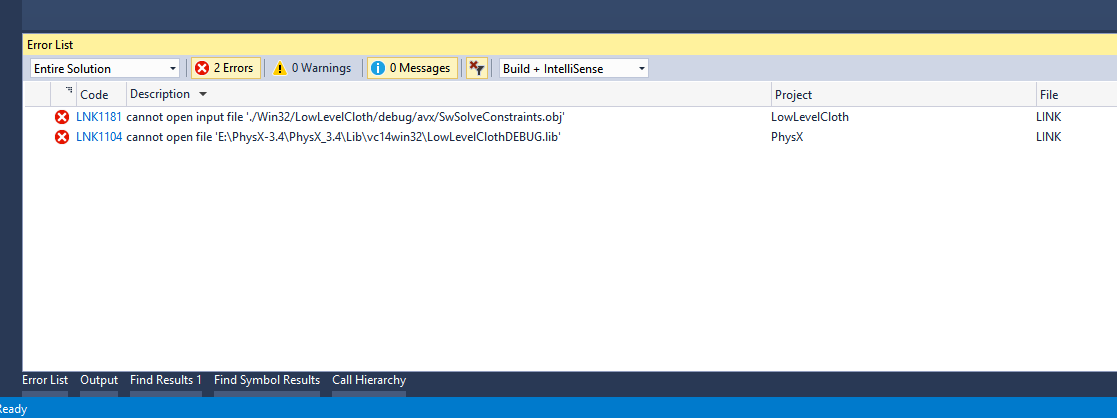
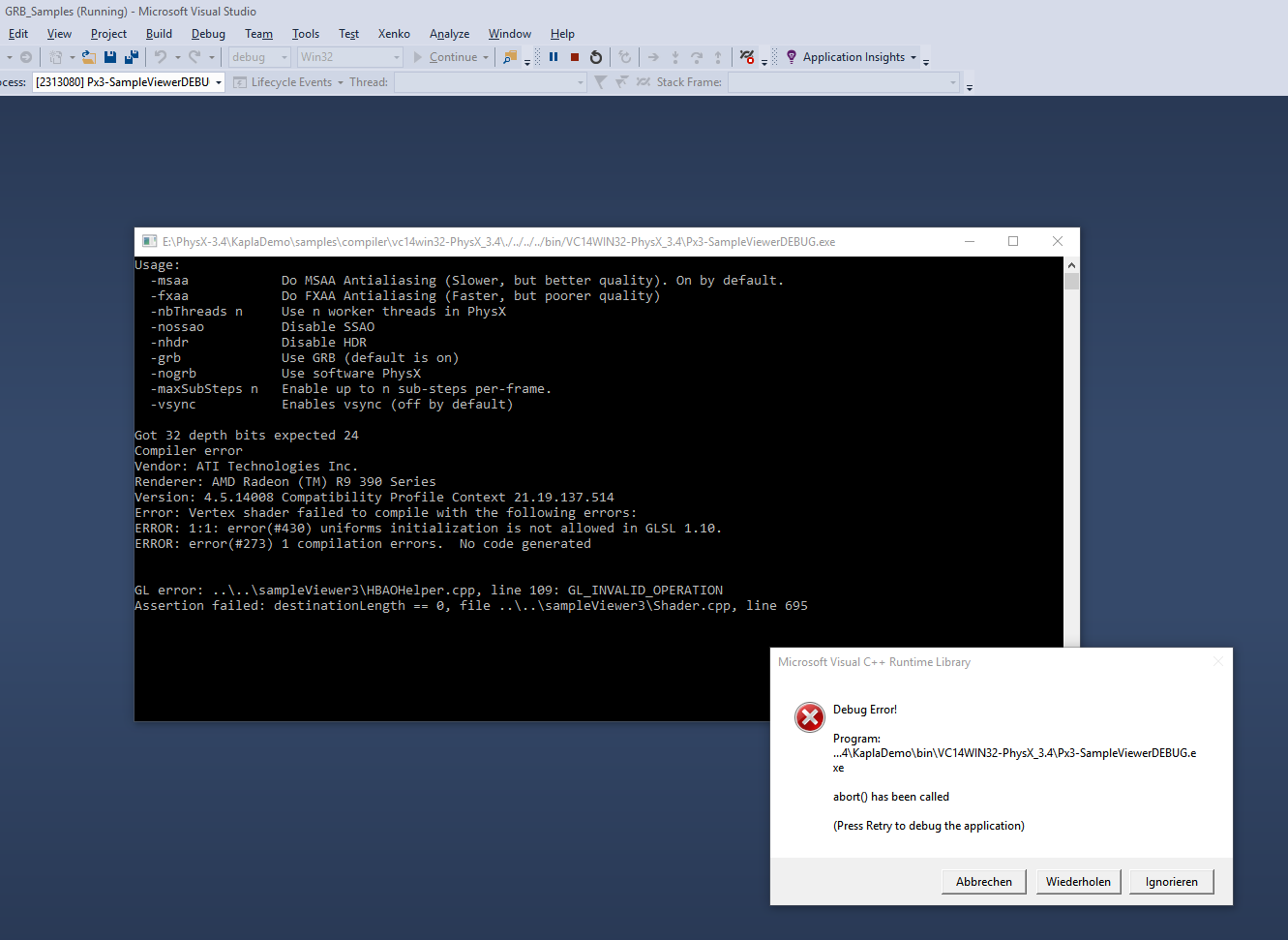
To build and run the Kapla Demo (KaplaDemo\samples\compiler) please make sure to build the PhysX SDK with the same Visual Studio version and with the same build configuration before compiling the Kapla Demo. This will make sure the appropriate DLLs are copied to the KaplaDemo bin directory.
This depot contains external third party open source software copyright their respective owners:
Alexander Chemeris, The Android Open Source Project, Brian Paul, Brodie Thiesfield, Electronic Arts, Emil Mikulic, FreeImage, Hewlett-Packard Company, Independent JPEG Group, John W. Ratcliff, Julio Jerez, Kevin Bray, The Khronos Group Inc., Kitware, Inc., Mark J. Kilgard, Microsoft Corporation, Open Dynamics Framework Group, Python Software Foundation, Univ. of Western Ontario, and the ASSIMP, clang and glew development teams.













































































































































































































{kind=link}