Semester project in Boston University Electrical & Computer Engineering Master's program.
By Matthew Boyd
Faculty: Osama Alshaykh
Contents
- Original Proposal
- Challenges and Adjustments
- Final Project Design
- Software Setup
- Results
- Learned Along the Way
- Final Poster
To design a collaborative, multi-robot system incorporating computer vision, robot operating system (ROS), and multi-robot control to demonstrate skills needed to pursue a career as a robotics software engineer.
See proposal PDF
The original proposal included mechanical, simulation, and computation components.
- Mechanical:
- (2) 6-DOF Arms (sized for desktop use and under $2K total for 2)
- 3D Camera
- Simulation:
- Minimal Gazebo environment with the 2 arms
- Computation:
- (6) ROS Topics

The 6-DOF arms originally proposed were a new product designed and built in China. They were in their first production runs as a new product and quickly went on back-order. With no chance of getting the arms during the semester, the decision was made in late February to find replacement arms.
I searched for a couple weeks for replacement arms that met the project requirements in terms of size, range of motion, and digital assets (for simulation). I eventually settled on the uArm 4-DOF desktop arms. They met all requirements and were immediately available, though they did have less range of motion.
Version 2 Change: (2) 6-DOF Arms --> (2) 4-DOF Arms

Halfway into the semester the campus closed because of COVID-19. This prevented any work with physical hardware and forced the entire project to move to a simulation only environment. I found a pre-built simulation environment that had two 6-DOF arms. The plan is to edit this pre-built environment to make it closely match the original goal of the project, including adding a camera and various bins for product sorting.
Version 3 Changes
- Mechanical arms + 3D camera --> Gazebo simulation only
- Minimal Gazebo environment --> Complex Gazebo environment
- 6 ROS Topics (for arms and grippers) --> 10 ROS Topics (arms, grippers, cameras)

Editing the pre-built environment proved to be a massive undertaking. Just editing it to include the components I needed would have taken the rest of the semester with no time left to actually code the simulation to function as intended: to autonomously identify and sort products.
In searching for pre-built cameras and alternative arms to add to the environment, I found the ARIAC 2020 Competition Gazebo simulation environment. It included all of the components and associated ROS services and topics to drive them, including multiple types of camera sensors, product shelves, product bins, parts that can be programmatically created and placed throughout the environment, and an in-built "product order" system to generate orders to be fulfilled by the dual-arm robot moving throughout the environment.
Version 4 Changes: See Final Project Design

The pre-built ARIAC 2020 Competition simulation environment provided by the NIST includes the following components:
- Gazebo:
- Factory floor "world" environment
- 3-DOF ceiling-mounted gantry on rails
- (2) 6-DOF robot arms attached to either side of the gantry each with pneumatic grippers
- Assets for 6 different sensors: break beam, laser scanner, depth camera, logical camera, proximity sensor, RGB-D camera
- (2) wheeled order-fulfillment carts with QA and order-verification sensors
- Conveyor belt
- (11) 2-tier shelves
- (16) parts bins
- Dummy parts
- Real parts for order fulfillment: 2 types, 3 colors each
- ROS:
- Services and topics supporting all of the Gazebo assets
- "Product Order" service and topic to publish information about the products needed for each order
- Optional MoveIT integration
- Launch files to start the simulation in both testing and competition modes
My tasks in this new environment:
- Select desired sensors from those provided
- Place the selected sensors throughout the environment
- Read the "product order" topic to determine which parts are needed
- Read the sensors to determine where the needed parts are located in the environment
- Transform the frame coordinates of each needed part from the camera frame to the world frame pose and robot-arm orientation so it can be picked up by one of the robot arms
- Add way-points and poses to prevent arms and robot from running into any obstacles
- Use MoveIT and way-points to plan a path for the robot and arm to reach the part, pick it up, and deliver it to the order fulfillment bin
Constraints of simulation:
- Parts will be spawned automatically in any of:
- Middle shelf of 5 of 11 shelving units (3 rear shelves and 2 front shelves)
- Any of the 16 parts bins
- Parts will be spawned only on shelves and bins (not on conveyor belt)
- Sensors can be placed in open space (they do not need to be attached to a supporting structure)
- Scenario A: 2 Orders, No Challenges:
- 2 Orders with 3 parts each need to be fulfilled
- No unusual challenges
- Scenario B: 1 Order, Products Dropped Randomly:
- 1 Order with 3 parts needs to be fulfilled
- Pneumatic gripper will periodically fail, dropping a part - part must be picked again from another location
- Scenario C: 1 Order, Moving Obstacle:
- 1 Order with 3 parts needs to be fulfilled
- A moving obstacle must be avoided in an aisle between shelves
- Moving obstacle moves up and down the aisle, pausing at each end of the aisle for an unknown amount of time
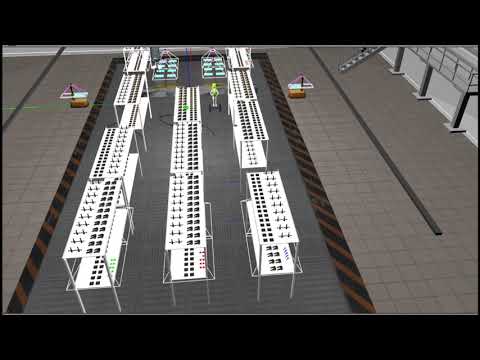
This is the Gazebo environment provided by the ARIAC 2020 Competition. It contains all of the shelves, bins, the gantry robot, some "dummy" parts, and the "real" parts to be picked to fulfill orders.
The "real" parts are in red, green, and blue.
The initial environment lacks any sensors to determine where the parts have been spawned.

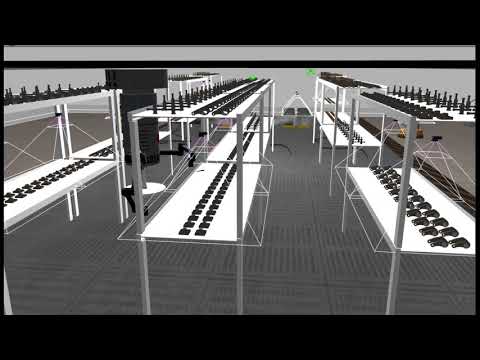
Here I have added 14 logical cameras to the Gazebo environment provided by the ARIAC 2020 Competition.The logical cameras are able to identify the "real" parts in their view by part type and color.
Each logical cameras each has its own reference frame separate from the world frame. The parts detected have their pose and orientation determined with respect to the detecting camera's frame. Thus each part's frame must be transformed with respect to both the world frame and the frame of the end effector that will be used to pick it up.
- 14 logical cameras:
- 2 each per shelf where parts may spawn
- 1 for every group of 4 parts bins where parts may spawn
YAML file placing logical cameras in environment
For "Scenario C: 1 Order, Moving Obstacle" I added 3 breakbeam sensors in the aisle to detect the movement of the obstacle.
YAML file placing logical cameras + 3 breakbeam sensors in environment
Logical Camera

Logical Cameras View 1

Logical Cameras View 2

Scenario C w/ Moving Obstacle & Breakbeam Sensors

Entire environment running in a virtual machine (VM):
- Host:
- Windows 10 Home
- Intel Core i7-6700HQ CPU
- 16GB RAM
- NVIDIA GeFOrce GTX 960M GPU
- VMware Workstation 15 Pro
- Guest:
- Ubuntu 18.04
- Single processor, 4 cores allocated
- 8GB RAM
- Gazebo 9
- ROS 1 Melodic
- MoveIT
Code Created (in code folder):
- YAML file placing logical cameras in environment - Scenarios A & B
- YAML file placing logical cameras + breakbeams in environment - Scenario C
- Scenario A: 2 Orders, No Challenges (see results)
- YAML file placing parts in environment
- MoveIT python file to run simulations
- Reads sensors to locate all products
- Reads "product order" topic
- Transforms product frame
- Calls path planning algorithm
- Picks parts and delivers them to correct order-fulfillment cart
- Scenario B: 1 Order, Products Dropped Randomly (see results)
- YAML file placing parts in environment and enabling "drops"
- MoveIT python file to run simulations
- Same as above, but handles dropped parts
- Detects drop, removes part from list of known parts, and ensures part is picked from another location
- Scenario C: 1 Order, Moving Obstacle (see results)
- YAML file placing parts in environment and enabling "moving obstacle"
- MoveIT python file to run simulations
- Same as above, but navigates around moving obstacle by reading 3 new breakbeam sensors
- Detects parts needed in aisle where person is moving, moves to space between shelves and waits for person to move toward far end of aisle.
Here I have added the code to determine where parts have been spawned by reading all of the logical cameras in the scene.
Each detected part's frame is transformed to the world frame and the end effector frame.
The automated set of orders is read (as a ROS topic; again, provided by the ARIAC competition environment) to determine which parts are needed for each order.
The location of the next part on the order is parsed to determine how to get the robot to it, and MoveIT is used to calculate the path to the part.
The robot picks each part and delivers it to the robotic tray assigned to that order.
This scenario is similar to Scenario A above, except the robot arm grippers periodically fail, dropping the products before they're delivered to the tray assigned to the order. My code must detect this dropped product and ensure a replacement part is picked again at some point to still fulfill the order successfully.
One key challenge is ensuring the dropped part is removed from the list of avaialble parts (so the arm does not go back to an empty spot and attempt to pick it up again).

This scenario is similar to Scenario A above, except there is now a "moving obstacle" (a person on a two-wheeled scooter) moving up and down one of the aisles between the shelves. This person must be detected and navigated around. My code reads the breakbeam sensors to detect the location and motion of the person to enter the aisle at the safest possible time when there is plenty of time to pick the part before the person returns.
One key challenge is the fact that the gantry cannot move past the end of the aisle. So it cannot simply move past the shelves to get out of the person's way - it must move back up the aisle, toward the oncoming person, to exit the aisle at the space between the shelves.
An additional challenge was adding code to read the breakbeam sensors regularly while other code was executing. I took advantage of the ROS subscriber mechanism to do these reads and compare values to determine when to move the robot.
edX “Hello ROS” course:
- 6 weeks, ~80 hrs
- ROS, Gazebo, MoveIT, rViz
Research for New Arms:
- Cost vs. Capabilities
- Simulation Assets
Investigate Pre-Built Gazebo Environments & Attempt to Modify
Outdated 4-DOF Arm Simulation Asset:
- Fork Outdated Code
- Manually Update from Gazebo 7 to Gazebo 9
- Publish Updated Code
Update Ideal New Simulation Environment:
- Remap Arm Joints
- Add Logical Cameras
- Design Control Algorithm
ROS:
- Using YAML files to place sensors
- Reading sensors and their message structure in code
- Subscribing to topics to read and update values in the background


