简体中文 | English
-
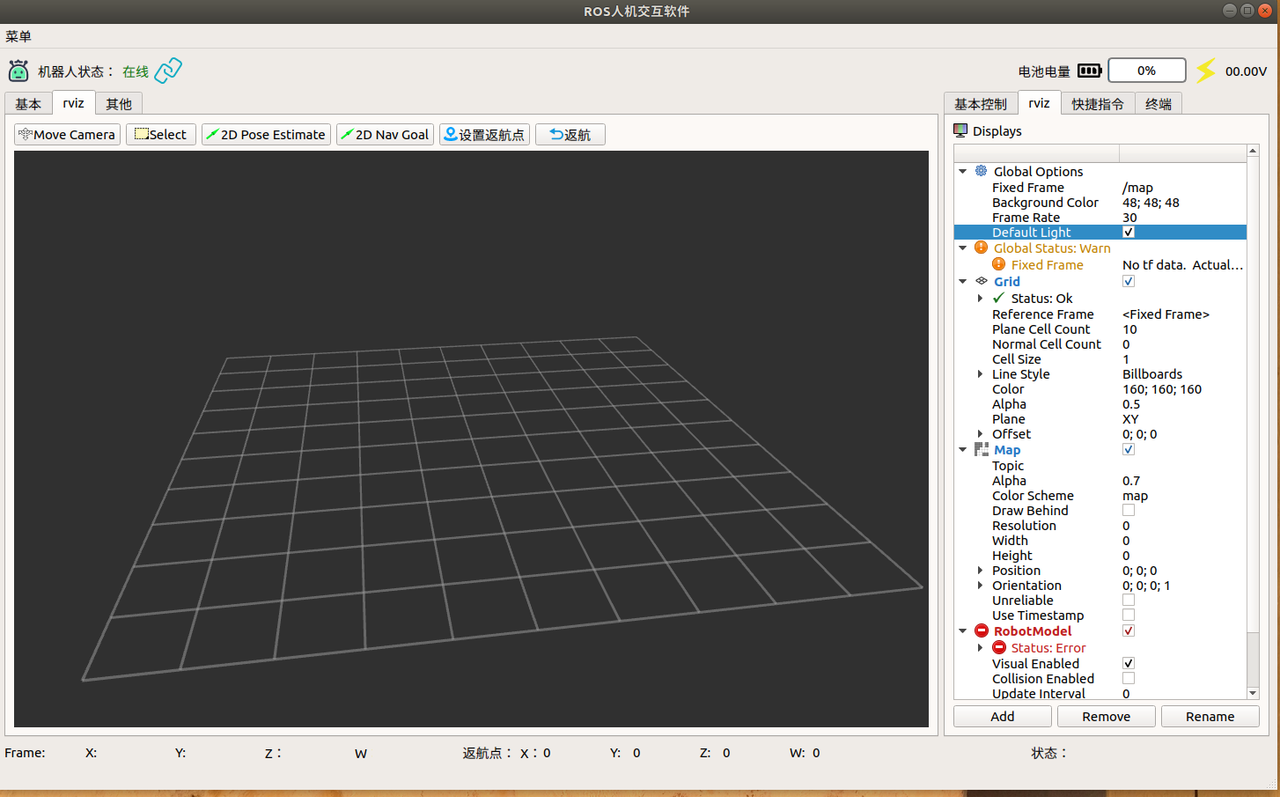
使用qt5实现ros机器人人机界面
-
注意!未经作者的许可,此代码仅用于学习,不能用于其他用途。
-
持续更新中.....
-
欢迎在issues提交bug
kinetic 版本分支(分支已合并)
2. Qml版本分支(待完善)
- 界面更加美观,功能简单,可作为机器人机载端显示
- qml_simple
3. Lite branch
- 此版本为《ROS人机交互软件开发》系列课程中实现的版本,实现了master分支的基本功能,代码易懂
- simple
4. Windows版本分支
5,rviz菜单树分支
-
使用rviz自带的菜单树,去实现添加显示图层。master分支所有的图层及菜单均需要手动去写代码实现(并且目前仅支持部分图层显示),此分支调用librviz现成api,所有图层均可以实现,不用去手动创建图层菜单和display
-
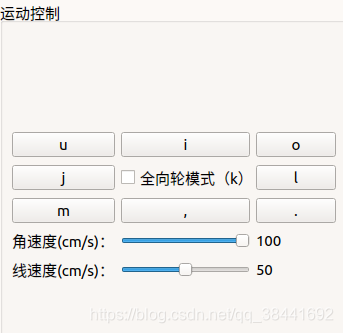
- 使用前须在菜单->设置->话题设置中设置odom话题:

- 使用前须在菜单->设置->话题设置中设置电量话题(Std_msg/Float32)



- 使用前须在菜单->设置->话题设置中设置amcl话题
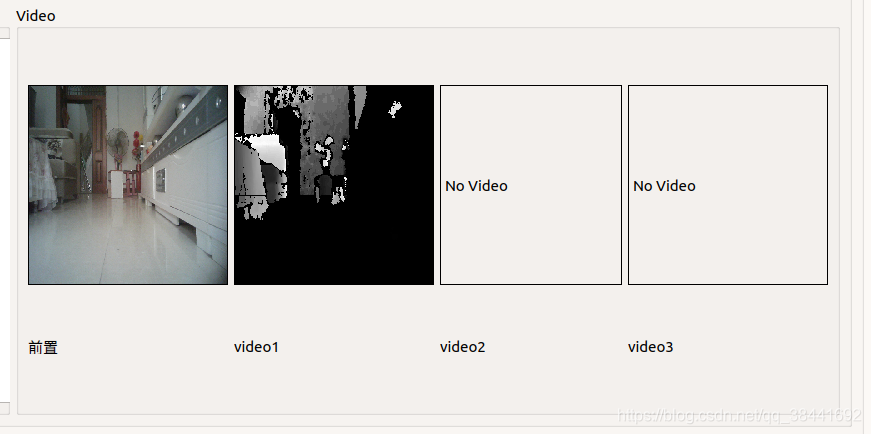
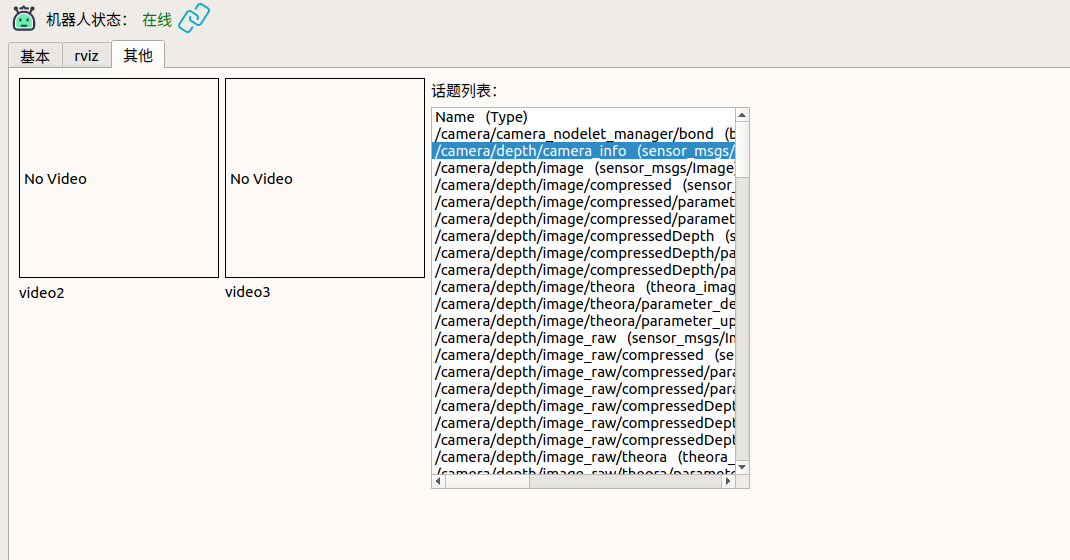
- Provides four image display forms that can display four images at the same time
- 提供四个图像显示窗体,可以同时显示四个图像



sudo apt-get install ros-melodic-qt-createsudo apt-get install ros-melodic-qt-buildsudo apt-get install qtmultimedia5-devPut the package in the ros src package directory: 将软件包放入ros src软件包目录下:
catkin_makerosrun cyrobot_monitor cyrobot_monitorGNU GPL(GNU General Public License,GNU通用公共许可证)

- 只要软件中包含了遵循本协议的产品或代码,该软件就必须也遵循 GPL 许可协议,也就是必须开源免费,不能闭源收费,不能作为商用软件。
GPL 开源协议的主要特点
-
复制自由 允许把软件复制到任何人的电脑中,并且不限制复制的数量。
-
传播自由 允许软件以各种形式进行传播。
-
收费传播 允许在各种媒介上出售该软件,但必须提前让买家知道这个软件是可以免费获得的;因此,一般来讲,开源软件都是通过为用户提供有偿服务的形式来盈利的。
-
修改自由 允许开发人员增加或删除软件的功能,但软件修改后必须依然基于GPL许可协议授权。