le@le-vm:~/zed$ ros2 launch zed_display_rviz2 display_zed2.launch.py
[INFO] [launch]: All log files can be found below /home/le/.ros/log/2021-07-20-08-05-56-588140-le-vm-5473
[INFO] [launch]: Default logging verbosity is set to INFO
/home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/launch/display_zed2.launch.py:51: UserWarning: The parameter 'node_executable' is deprecated, use 'executable' instead
rsp_node = Node(
/home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/launch/display_zed2.launch.py:51: UserWarning: The parameter 'node_name' is deprecated, use 'name' instead
rsp_node = Node(
/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/actions/node.py:185: UserWarning: The parameter 'node_namespace' is deprecated, use 'namespace' instead
warnings.warn("The parameter 'node_namespace' is deprecated, use 'namespace' instead")
/home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/launch/display_zed2.launch.py:61: UserWarning: The parameter 'node_executable' is deprecated, use 'executable' instead
zed_wrapper_node = Node(
/home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/launch/display_zed2.launch.py:61: UserWarning: The parameter 'node_name' is deprecated, use 'name' instead
zed_wrapper_node = Node(
/home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/launch/display_zed2.launch.py:74: UserWarning: The parameter 'node_executable' is deprecated, use 'executable' instead
rviz2_node = Node(
/home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/launch/display_zed2.launch.py:74: UserWarning: The parameter 'node_name' is deprecated, use 'name' instead
rviz2_node = Node(
[INFO] [robot_state_publisher-1]: process started with pid [5475]
[INFO] [zed_wrapper-2]: process started with pid [5477]
[INFO] [rviz2-3]: process started with pid [5479]
[robot_state_publisher-1] 1626782756.663415031 [zed2.zed2_state_publisher] [WARN] No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-1] Parsing robot urdf xml string.
[robot_state_publisher-1] Link zed2_camera_center had 2 children
[robot_state_publisher-1] Link zed2_left_camera_frame had 1 children
[robot_state_publisher-1] Link zed2_left_camera_optical_frame had 0 children
[robot_state_publisher-1] Link zed2_right_camera_frame had 1 children
[robot_state_publisher-1] Link zed2_right_camera_optical_frame had 0 children
[robot_state_publisher-1] 1626782756.664333823 [zed2.zed2_state_publisher] [INFO] got segment base_link
[robot_state_publisher-1] 1626782756.664347309 [zed2.zed2_state_publisher] [INFO] got segment zed2_camera_center
[robot_state_publisher-1] 1626782756.664352298 [zed2.zed2_state_publisher] [INFO] got segment zed2_left_camera_frame
[robot_state_publisher-1] 1626782756.664356676 [zed2.zed2_state_publisher] [INFO] got segment zed2_left_camera_optical_frame
[robot_state_publisher-1] 1626782756.664360704 [zed2.zed2_state_publisher] [INFO] got segment zed2_right_camera_frame
[robot_state_publisher-1] 1626782756.664364621 [zed2.zed2_state_publisher] [INFO] got segment zed2_right_camera_optical_frame
[zed_wrapper-2] 1626782756.676308156 [zed2.zed_node] [INFO] ********************************
[zed_wrapper-2] 1626782756.676395149 [zed2.zed_node] [INFO] ZED Camera Component
[zed_wrapper-2] 1626782756.676401541 [zed2.zed_node] [INFO] ********************************
[zed_wrapper-2] 1626782756.676406560 [zed2.zed_node] [INFO] * namespace: /zed2
[zed_wrapper-2] 1626782756.676411249 [zed2.zed_node] [INFO] * node name: zed_node
[zed_wrapper-2] 1626782756.676415126 [zed2.zed_node] [INFO] ********************************
[zed_wrapper-2] 1626782756.676444070 [zed2.zed_node] [INFO] *** GENERAL parameters ***
[zed_wrapper-2] 1626782756.676464369 [zed2.zed_node] [INFO] * Camera model: zed2 - ZED 2
[zed_wrapper-2] 1626782756.676476291 [zed2.zed_node] [INFO] * SDK Verbose: 1
[zed_wrapper-2] 1626782756.676486550 [zed2.zed_node] [INFO] * SVO:
[zed_wrapper-2] 1626782756.676494164 [zed2.zed_node] [INFO] * SVO Loop: FALSE
[zed_wrapper-2] 1626782756.676501438 [zed2.zed_node] [INFO] * SVO Realtime: FALSE
[zed_wrapper-2] 1626782756.676509714 [zed2.zed_node] [INFO] * Camera name: zed2
[zed_wrapper-2] 1626782756.676522798 [zed2.zed_node] [INFO] * Camera ID: 0
[zed_wrapper-2] 1626782756.676530843 [zed2.zed_node] [INFO] * Camera SN: 0
[zed_wrapper-2] 1626782756.676539029 [zed2.zed_node] [INFO] * Camera timeout [sec]: 5
[zed_wrapper-2] 1626782756.676547164 [zed2.zed_node] [INFO] * Camera reconnection temptatives: 5
[zed_wrapper-2] 1626782756.676554978 [zed2.zed_node] [INFO] * Camera framerate: 30
[zed_wrapper-2] 1626782756.676563094 [zed2.zed_node] [INFO] * GPU ID: -1
[zed_wrapper-2] 1626782756.676573994 [zed2.zed_node] [INFO] * Camera resolution: 2 - HD720
[zed_wrapper-2] 1626782756.676581588 [zed2.zed_node] [INFO] * Camera self calibration: TRUE
[zed_wrapper-2] 1626782756.676588742 [zed2.zed_node] [INFO] * Camera flip: FALSE
[zed_wrapper-2] 1626782756.676598109 [zed2.zed_node] [INFO] * [DYN] Publish framerate [Hz]: 15
[zed_wrapper-2] 1626782756.676607046 [zed2.zed_node] [INFO] *** VIDEO parameters ***
[zed_wrapper-2] 1626782756.676615482 [zed2.zed_node] [INFO] * Use old extrinsic parameters: 0
[zed_wrapper-2] 1626782756.676625260 [zed2.zed_node] [INFO] * [DYN] Image downsample factor: 0.5
[zed_wrapper-2] 1626782756.676634798 [zed2.zed_node] [INFO] * [DYN] Brightness: 4
[zed_wrapper-2] 1626782756.676642783 [zed2.zed_node] [INFO] * [DYN] Contrast: 4
[zed_wrapper-2] 1626782756.676650137 [zed2.zed_node] [INFO] * [DYN] Hue: 0
[zed_wrapper-2] 1626782756.676657952 [zed2.zed_node] [INFO] * [DYN] Saturation: 4
[zed_wrapper-2] 1626782756.676665446 [zed2.zed_node] [INFO] * [DYN] Sharpness: 4
[zed_wrapper-2] 1626782756.676673110 [zed2.zed_node] [INFO] * [DYN] Gamma: 8
[zed_wrapper-2] 1626782756.676684622 [zed2.zed_node] [INFO] * [DYN] Auto Exposure/Gain: TRUE
[zed_wrapper-2] 1626782756.676837208 [zed2.zed_node] [INFO] * [DYN] Exposure: 80
[zed_wrapper-2] 1626782756.676862195 [zed2.zed_node] [INFO] * [DYN] Gain: 80
[zed_wrapper-2] 1626782756.676883374 [zed2.zed_node] [INFO] * [DYN] Auto White Balance: TRUE
[zed_wrapper-2] 1626782756.676899324 [zed2.zed_node] [INFO] * [DYN] White Balance Temperature: 42
[zed_wrapper-2] 1626782756.676916146 [zed2.zed_node] [INFO] * Video QoS History: KEEP_LAST
[zed_wrapper-2] 1626782756.676930122 [zed2.zed_node] [INFO] * Video QoS History depth: 1
[zed_wrapper-2] 1626782756.676945140 [zed2.zed_node] [INFO] * Video QoS Reliability: BEST_EFFORT
[zed_wrapper-2] 1626782756.677011484 [zed2.zed_node] [INFO] * Video QoS Durability: VOLATILE
[zed_wrapper-2] 1626782756.677021123 [zed2.zed_node] [INFO] *** DEPTH parameters ***
[zed_wrapper-2] 1626782756.677049335 [zed2.zed_node] [INFO] * Depth downsample factor: 0.5
[zed_wrapper-2] 1626782756.677088940 [zed2.zed_node] [INFO] * Depth quality: 1 - PERFORMANCE
[zed_wrapper-2] 1626782756.677129927 [zed2.zed_node] [INFO] * Min depth [m]: 0.3
[zed_wrapper-2] 1626782756.677164261 [zed2.zed_node] [INFO] * Max depth [m]: 20
[zed_wrapper-2] 1626782756.677200068 [zed2.zed_node] [INFO] * Depth Sensing Mode: 0 - STANDARD
[zed_wrapper-2] 1626782756.677217290 [zed2.zed_node] [INFO] * Depth Stabilization: TRUE
[zed_wrapper-2] 1626782756.677234853 [zed2.zed_node] [INFO] * OpenNI mode (16bit point cloud): FALSE
[zed_wrapper-2] 1626782756.677252777 [zed2.zed_node] [INFO] * [DYN] Point cloud rate [Hz]: 10
[zed_wrapper-2] 1626782756.677268206 [zed2.zed_node] [INFO] * [DYN] Depth Confidence: 50
[zed_wrapper-2] 1626782756.677283164 [zed2.zed_node] [INFO] * [DYN] Depth Texture Confidence: 100
[zed_wrapper-2] 1626782756.677297210 [zed2.zed_node] [INFO] * Depth QoS History: KEEP_LAST
[zed_wrapper-2] 1626782756.677312970 [zed2.zed_node] [INFO] * Depth QoS History depth: 1
[zed_wrapper-2] 1626782756.677330132 [zed2.zed_node] [INFO] * Depth QoS Reliability: BEST_EFFORT
[zed_wrapper-2] 1626782756.677346493 [zed2.zed_node] [INFO] * Depth QoS Durability: VOLATILE
[zed_wrapper-2] 1626782756.677380226 [zed2.zed_node] [INFO] *** POSITIONAL TRACKING parameters ***
[zed_wrapper-2] 1626782756.677447582 [zed2.zed_node] [INFO] * Positional tracking enabled: TRUE
[zed_wrapper-2] 1626782756.677483389 [zed2.zed_node] [INFO] * Base frame id: base_link
[zed_wrapper-2] 1626782756.677517243 [zed2.zed_node] [INFO] * Map frame id: map
[zed_wrapper-2] 1626782756.677553962 [zed2.zed_node] [INFO] * Odometry frame id: odom
[zed_wrapper-2] 1626782756.677589839 [zed2.zed_node] [INFO] * Broadcast Odometry TF: TRUE
[zed_wrapper-2] 1626782756.677624183 [zed2.zed_node] [INFO] * Broadcast Pose TF: TRUE
[zed_wrapper-2] 1626782756.677642939 [zed2.zed_node] [INFO] * Broadcast Static IMU TF [not for ZED]: TRUE
[zed_wrapper-2] 1626782756.677658648 [zed2.zed_node] [INFO] * [DYN] Path publishing rate: 2
[zed_wrapper-2] 1626782756.677668947 [zed2.zed_node] [INFO] * Path history lenght: -1
[zed_wrapper-2] 1626782756.677687212 [zed2.zed_node] [INFO] * Initial pose: [0,0,0,0,0,0,]
[zed_wrapper-2] 1626782756.677701989 [zed2.zed_node] [INFO] * Area Memory: TRUE
[zed_wrapper-2] 1626782756.677714633 [zed2.zed_node] [INFO] * Area Memory DB:
[zed_wrapper-2] 1626782756.677726475 [zed2.zed_node] [INFO] * IMU Fusion [not for ZED]: TRUE
[zed_wrapper-2] 1626782756.677735743 [zed2.zed_node] [INFO] * Floor Alignment: FALSE
[zed_wrapper-2] 1626782756.677749629 [zed2.zed_node] [INFO] * Init Odometry with first valid pose data: TRUE
[zed_wrapper-2] 1626782756.677761511 [zed2.zed_node] [INFO] * 2D mode: FALSE
[zed_wrapper-2] 1626782756.677772171 [zed2.zed_node] [INFO] * Pose/Odometry QoS History: KEEP_LAST
[zed_wrapper-2] 1626782756.677783582 [zed2.zed_node] [INFO] * Pose/Odometry QoS History depth: 1
[zed_wrapper-2] 1626782756.677791437 [zed2.zed_node] [INFO] * Pose/Odometry QoS Reliability: BEST_EFFORT
[zed_wrapper-2] 1626782756.677801346 [zed2.zed_node] [INFO] * Pose/Odometry QoS Durability: VOLATILE
[zed_wrapper-2] 1626782756.677808870 [zed2.zed_node] [INFO] *** SENSORS STACK parameters ***
[zed_wrapper-2] 1626782756.677826543 [zed2.zed_node] [INFO] * Sensors Camera Sync: FALSE
[zed_wrapper-2] 1626782756.677842182 [zed2.zed_node] [INFO] * Sensors publishing rate: 200 Hz
[zed_wrapper-2] 1626782756.677851470 [zed2.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] 1626782756.677861288 [zed2.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-2] 1626782756.677872579 [zed2.zed_node] [INFO] * Sensors QoS Reliability: BEST_EFFORT
[zed_wrapper-2] 1626782756.677880644 [zed2.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] 1626782756.677886656 [zed2.zed_node] [INFO] *** Spatial Mapping parameters ***
[zed_wrapper-2] 1626782756.677902756 [zed2.zed_node] [INFO] * Spatial Mapping Enabled: FALSE
[zed_wrapper-2] 1626782756.677917022 [zed2.zed_node] [INFO] * Spatial Mapping resolution [m]: 0.1
[zed_wrapper-2] 1626782756.677932111 [zed2.zed_node] [INFO] * 3D Max Mapping range [m]: 20
[zed_wrapper-2] 1626782756.677942781 [zed2.zed_node] [INFO] * Map publishing rate [Hz]: 0.5
[zed_wrapper-2] 1626782756.677954012 [zed2.zed_node] [INFO] * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] 1626782756.677965143 [zed2.zed_node] [INFO] * Sensors QoS History depth: 1
[zed_wrapper-2] 1626782756.677975642 [zed2.zed_node] [INFO] * Sensors QoS Reliability: BEST_EFFORT
[zed_wrapper-2] 1626782756.677986653 [zed2.zed_node] [INFO] * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] 1626782756.677994187 [zed2.zed_node] [INFO] *** OBJECT DETECTION parameters ***
[zed_wrapper-2] 1626782756.678003915 [zed2.zed_node] [INFO] * Object Detection enabled: FALSE
[zed_wrapper-2] 1626782756.678018553 [zed2.zed_node] [INFO] * OD min. confidence: 50
[zed_wrapper-2] 1626782756.678032239 [zed2.zed_node] [INFO] * Object Detection model: 0 - MULTI CLASS BOX FAST
[zed_wrapper-2] 1626782756.678045343 [zed2.zed_node] [INFO] * MultiClassBox people: TRUE
[zed_wrapper-2] 1626782756.678058418 [zed2.zed_node] [INFO] * MultiClassBox vehicles: TRUE
[zed_wrapper-2] 1626782756.678068406 [zed2.zed_node] [INFO] * MultiClassBox bags: TRUE
[zed_wrapper-2] 1626782756.678081311 [zed2.zed_node] [INFO] * MultiClassBox animals: TRUE
[zed_wrapper-2] 1626782756.678091790 [zed2.zed_node] [INFO] * MultiClassBox electronics: TRUE
[zed_wrapper-2] 1626782756.678109624 [zed2.zed_node] [INFO] * MultiClassBox fruits and vegetables: TRUE
[zed_wrapper-2] 1626782756.678122488 [zed2.zed_node] [INFO] * Skeleton fitting: FALSE
[zed_wrapper-2] 1626782756.678139139 [zed2.zed_node] [INFO] * Obj. Det. QoS History: KEEP_LAST
[zed_wrapper-2] 1626782756.678150921 [zed2.zed_node] [INFO] * Obj. Det. QoS History depth: 1
[zed_wrapper-2] 1626782756.678161250 [zed2.zed_node] [INFO] * Obj. Det. QoS Reliability: BEST_EFFORT
[zed_wrapper-2] 1626782756.678170868 [zed2.zed_node] [INFO] * Obj. Det. QoS Durability: VOLATILE
[zed_wrapper-2] 1626782756.678177240 [zed2.zed_node] [INFO] *** SERVICES ***
[zed_wrapper-2] 1626782756.678620061 [zed2.zed_node] [INFO] * '/zed2/zed_node/reset_odometry'
[zed_wrapper-2] 1626782756.678913521 [zed2.zed_node] [INFO] * '/zed2/zed_node/reset_pos_tracking'
[zed_wrapper-2] 1626782756.679340151 [zed2.zed_node] [INFO] * '/zed2/zed_node/set_pose'
[zed_wrapper-2] 1626782756.679654520 [zed2.zed_node] [INFO] * '/zed2/zed_node/enable_obj_det'
[zed_wrapper-2] 1626782756.679906843 [zed2.zed_node] [INFO] * '/zed2/zed_node/enable_mapping'
[zed_wrapper-2] 1626782756.680281726 [zed2.zed_node] [INFO] * '/zed2/zed_node/start_svo_rec'
[zed_wrapper-2] 1626782756.680617686 [zed2.zed_node] [INFO] * '/zed2/zed_node/stop_svo_rec'
[zed_wrapper-2] 1626782756.681006756 [zed2.zed_node] [INFO] * '/zed2/zed_node/toggle_svo_pause'
[zed_wrapper-2] 1626782756.681022625 [zed2.zed_node] [INFO] ***** STARTING CAMERA *****
[zed_wrapper-2] 1626782756.681032123 [zed2.zed_node] [INFO] SDK Version: 3.5.0 - Build 24184_2d27c82a
[zed_wrapper-2] 1626782756.683128554 [zed2.zed_node] [INFO] *** CAMERA OPENING ***
[rviz2-3] 1626782757.197853401 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] 1626782757.197945864 [rviz2] [INFO] OpenGl version: 4.6 (GLSL 4.6)
[zed_wrapper-2] [ZED][Init] Depth mode: PERFORMANCE
[rviz2-3] 1626782757.307099812 [rviz2] [INFO] Stereo is NOT SUPPORTED
[rviz2-3] /opt/ros/foxy/lib/rviz2/rviz2: symbol lookup error: /home/le/zed/install/rviz_plugin_zed_od/lib/librviz_plugin_zed_od.so: undefined symbol: _ZN15message_filters10Connection10disconnectEv
[ERROR] [rviz2-3]: process has died [pid 5479, exit code 127, cmd '/opt/ros/foxy/lib/rviz2/rviz2 -d /home/le/zed/install/zed_display_rviz2/share/zed_display_rviz2/rviz2/zed2.rviz --ros-args -r __node:=zed2_rviz2 -r __node:=zed2_rviz2 -r __ns:=/zed2'].
[zed_wrapper-2] [ZED][Init] Video mode: HD720@30
[zed_wrapper-2] 1626782758.111523774 [zed2.zed_node] [INFO] ZED SDK running on GPU #0
[zed_wrapper-2] 1626782758.111581903 [zed2.zed_node] [INFO] * Camera Model -> ZED 2
[zed_wrapper-2] 1626782758.111590109 [zed2.zed_node] [INFO] * Serial Number-> 29352887
[zed_wrapper-2] 1626782758.111614104 [zed2.zed_node] [INFO] * Input type -> USB input type
[zed_wrapper-2] 1626782758.111623010 [zed2.zed_node] [INFO] * Camera FW Version -> 1523
[zed_wrapper-2] 1626782758.111629993 [zed2.zed_node] [INFO] * Sensors FW Version -> 776
[zed_wrapper-2] 1626782758.111679196 [zed2.zed_node] [INFO] *** TF FRAMES ***
[zed_wrapper-2] 1626782758.111688683 [zed2.zed_node] [INFO] * Map -> map
[zed_wrapper-2] 1626782758.111695306 [zed2.zed_node] [INFO] * Odometry -> odom
[zed_wrapper-2] 1626782758.111701568 [zed2.zed_node] [INFO] * Base -> base_link
[zed_wrapper-2] 1626782758.111707749 [zed2.zed_node] [INFO] * Camera -> zed2_camera_center
[zed_wrapper-2] 1626782758.111716486 [zed2.zed_node] [INFO] * Left -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111723459 [zed2.zed_node] [INFO] * Left Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1626782758.111730061 [zed2.zed_node] [INFO] * RGB -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111736403 [zed2.zed_node] [INFO] * RGB Optical -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111742615 [zed2.zed_node] [INFO] * Right -> zed2_right_camera_frame
[zed_wrapper-2] 1626782758.111748886 [zed2.zed_node] [INFO] * Right Optical-> zed2_right_camera_optical_frame
[zed_wrapper-2] 1626782758.111755168 [zed2.zed_node] [INFO] * Depth -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111761310 [zed2.zed_node] [INFO] * Depth Optical-> zed2_left_camera_optical_frame
[zed_wrapper-2] 1626782758.111767451 [zed2.zed_node] [INFO] * Point Cloud -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1626782758.111773793 [zed2.zed_node] [INFO] * Disparity -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111779945 [zed2.zed_node] [INFO] * Disparity Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1626782758.111786176 [zed2.zed_node] [INFO] * Confidence -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111792398 [zed2.zed_node] [INFO] * Confidence Optical -> zed2_left_camera_optical_frame
[zed_wrapper-2] 1626782758.111798690 [zed2.zed_node] [INFO] * IMU -> zed2_imu_link
[zed_wrapper-2] 1626782758.111805883 [zed2.zed_node] [INFO] * Barometer -> zed2_camera_center
[zed_wrapper-2] 1626782758.111817435 [zed2.zed_node] [INFO] * Magnetometer -> zed2_imu_link
[zed_wrapper-2] 1626782758.111823687 [zed2.zed_node] [INFO] * Left Temperature -> zed2_left_camera_frame
[zed_wrapper-2] 1626782758.111829788 [zed2.zed_node] [INFO] * Right Temperature -> zed2_right_camera_frame
[zed_wrapper-2] 1626782758.111838745 [zed2.zed_node] [INFO] *** PUBLISHED TOPICS ***
[zed_wrapper-2] 1626782758.113504688 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/image_rect_color
[zed_wrapper-2] 1626782758.113814459 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/image_rect_gray
[zed_wrapper-2] 1626782758.113840999 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb/camera_info
[zed_wrapper-2] 1626782758.114157783 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] 1626782758.114483514 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-2] 1626782758.114506807 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/rgb_raw/camera_info
[zed_wrapper-2] 1626782758.114834512 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left/image_rect_color
[zed_wrapper-2] 1626782758.115178096 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left/image_rect_gray
[zed_wrapper-2] 1626782758.115192022 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left/camera_info
[zed_wrapper-2] 1626782758.115429277 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left_raw/image_raw_color
[zed_wrapper-2] 1626782758.115668576 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left_raw/image_raw_gray
[zed_wrapper-2] 1626782758.115681390 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left_raw/camera_info
[zed_wrapper-2] 1626782758.115908245 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/right/image_rect_color
[zed_wrapper-2] 1626782758.116206534 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/right/image_rect_gray
[zed_wrapper-2] 1626782758.116239596 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/right/camera_info
[zed_wrapper-2] 1626782758.116688198 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/right_raw/image_raw_color
[zed_wrapper-2] 1626782758.117138272 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/right_raw/image_raw_gray
[zed_wrapper-2] 1626782758.117169320 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/right_raw/camera_info
[zed_wrapper-2] 1626782758.117608684 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/depth/depth_registered
[zed_wrapper-2] 1626782758.117639381 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/depth/camera_info
[zed_wrapper-2] 1626782758.117867609 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/stereo/image_rect_color
[zed_wrapper-2] 1626782758.118102329 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] 1626782758.118327592 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/confidence/confidence_map
[zed_wrapper-2] 1626782758.118820907 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/disparity/disparity_image
[zed_wrapper-2] 1626782758.119087476 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/point_cloud/cloud_registered
[zed_wrapper-2] 1626782758.119443254 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/pose
[zed_wrapper-2] 1626782758.119719181 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/pose_with_covariance
[zed_wrapper-2] 1626782758.120195554 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/odom
[zed_wrapper-2] 1626782758.120454049 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/path_map
[zed_wrapper-2] 1626782758.120652471 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/path_odom
[zed_wrapper-2] 1626782758.120968503 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/imu/data
[zed_wrapper-2] 1626782758.121153009 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/imu/data_raw
[zed_wrapper-2] 1626782758.121375987 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/temperature/imu
[zed_wrapper-2] 1626782758.121562186 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/imu/mag
[zed_wrapper-2] 1626782758.121755329 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/atm_press
[zed_wrapper-2] 1626782758.121944633 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/temperature/left
[zed_wrapper-2] 1626782758.122097841 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/temperature/right
[zed_wrapper-2] 1626782758.122284791 [zed2.zed_node] [INFO] Advertised on topic: /zed2/zed_node/left_cam_imu_transform [LATCHED]
[zed_wrapper-2] 1626782758.122296273 [zed2.zed_node] [INFO] Camera-IMU Translation:
[zed_wrapper-2] -0.002 -0.023 -0.002
[zed_wrapper-2] 1626782758.122319246 [zed2.zed_node] [INFO] Camera-IMU Rotation:
[zed_wrapper-2] 7FFD54F685E0
[zed_wrapper-2] 0.999995 0.003136 -0.000548
[zed_wrapper-2] -0.003136 0.999994 -0.001484
[zed_wrapper-2] 0.000544 0.001486 0.999999
[zed_wrapper-2]
[zed_wrapper-2] 1626782758.122348711 [zed2.zed_node] [INFO] Published static TF: 'zed2_imu_link' -> 'zed2_left_camera_frame'
[zed_wrapper-2] 1626782758.137006395 [zed2.zed_node] [INFO] *** Starting Positional Tracking ***
[zed_wrapper-2] 1626782758.137057280 [zed2.zed_node] [INFO] * Waiting for valid static transformations...
[zed_wrapper-2] 1626782758.137131630 [zed2.zed_node] [INFO] Static transform Sensor to Base [zed2_left_camera_frame -> base_link]
[zed_wrapper-2] 1626782758.137147680 [zed2.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] 1626782758.137165453 [zed2.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1626782758.137187044 [zed2.zed_node] [INFO] Static transform Sensor to Camera Center [zed2_left_camera_frame -> zed2_camera_center]
[zed_wrapper-2] 1626782758.137196581 [zed2.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] 1626782758.137214886 [zed2.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1626782758.137231206 [zed2.zed_node] [INFO] Static transform Camera Center to Base [zed2_camera_center -> base_link]
[zed_wrapper-2] 1626782758.137265481 [zed2.zed_node] [INFO] * Translation: {0.000,0.000,0.000}
[zed_wrapper-2] 1626782758.137282242 [zed2.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1626782758.237364149 [zed2.zed_node] [INFO] Initial ZED left camera pose (ZED pos. tracking):
[zed_wrapper-2] 1626782758.237403583 [zed2.zed_node] [INFO] * T: [0,0.06,0]
[zed_wrapper-2] 1626782758.237420044 [zed2.zed_node] [INFO] * Q: [0,0,0,1]
[zed_wrapper-2] 1626782758.410986326 [zed2.zed_node] [INFO] Odometry aligned to last tracking pose
After rviz crashes I just stay with this message on the terminal.
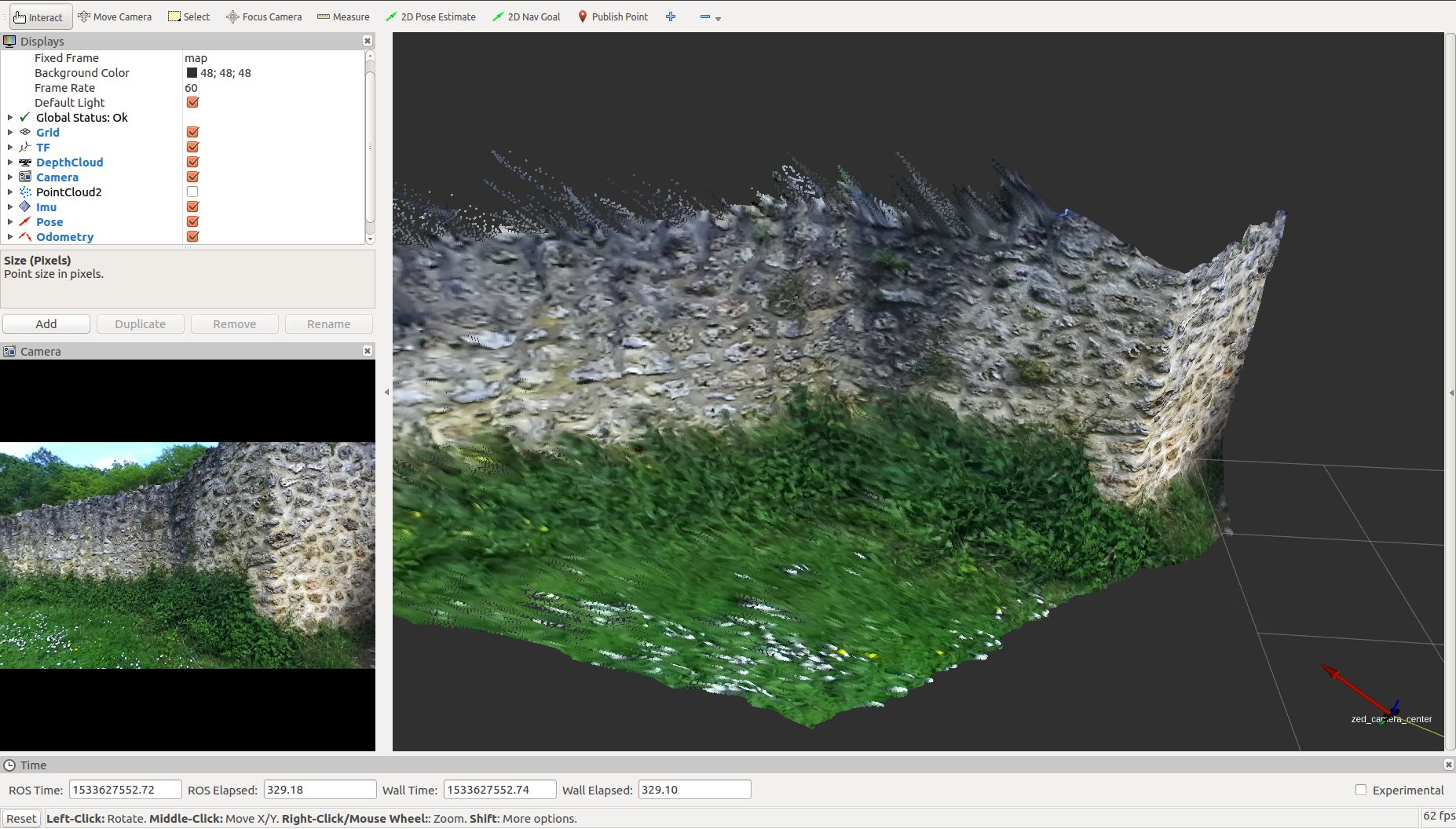
However using this command ros2 launch zed_display_rviz2 display_zed.launch.py
rviz works and the mssage is
Moreover, I am unable to see RGB image
fer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[zed_wrapper-2] 1626782939.705339609 [zed.zed_node] [INFO] ZED SDK running on GPU #0
[zed_wrapper-2] 1626782939.705393650 [zed.zed_node] [WARN] Camera model does not match user parameter. Please modify the value of the parameter 'general.camera_model' to 'zed2'
[zed_wrapper-2] 1626782939.705403539 [zed.zed_node] [INFO] * Camera Model -> ZED 2
[zed_wrapper-2] 1626782939.705408779 [zed.zed_node] [INFO] * Serial Number -> 29352887
[zed_wrapper-2] 1626782939.705421001 [zed.zed_node] [INFO] * Input type -> USB input type
[zed_wrapper-2] 1626782939.705427514 [zed.zed_node] [INFO] * Camera FW Version -> 1523
[zed_wrapper-2] 1626782939.705432132 [zed.zed_node] [INFO] * Sensors FW Version -> 776
[zed_wrapper-2] 1626782939.705462089 [zed.zed_node] [INFO] *** TF FRAMES ***
[zed_wrapper-2] 1626782939.705470905 [zed.zed_node] [INFO] * Map -> map
[zed_wrapper-2] 1626782939.705475614 [zed.zed_node] [INFO] * Odometry -> odom
[zed_wrapper-2] 1626782939.705480142 [zed.zed_node] [INFO] * Base -> base_link
[zed_wrapper-2] 1626782939.705484511 [zed.zed_node] [INFO] * Camera -> zed_camera_center
[zed_wrapper-2] 1626782939.705489109 [zed.zed_node] [INFO] * Left -> zed_left_camera_frame
[zed_wrapper-2] 1626782939.705493628 [zed.zed_node] [INFO] * Left Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1626782939.705498066 [zed.zed_node] [INFO] * RGB -> zed_left_camera_frame
[zed_wrapper-2] 1626782939.705502564 [zed.zed_node] [INFO] * RGB Optical -> zed_left_camera_frame
[zed_wrapper-2] 1626782939.705507053 [zed.zed_node] [INFO] * Right -> zed_right_camera_frame
[zed_wrapper-2] 1626782939.705511521 [zed.zed_node] [INFO] * Right Optical -> zed_right_camera_optical_frame
[zed_wrapper-2] 1626782939.705516080 [zed.zed_node] [INFO] * Depth -> zed_left_camera_frame
[zed_wrapper-2] 1626782939.705522782 [zed.zed_node] [INFO] * Depth Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1626782939.705529074 [zed.zed_node] [INFO] * Point Cloud -> zed_left_camera_optical_frame
[zed_wrapper-2] 1626782939.705535847 [zed.zed_node] [INFO] * Disparity -> zed_left_camera_frame
[zed_wrapper-2] 1626782939.705540475 [zed.zed_node] [INFO] * Disparity Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1626782939.705544924 [zed.zed_node] [INFO] * Confidence -> zed_left_camera_frame
[zed_wrapper-2] 1626782939.705553249 [zed.zed_node] [INFO] * Confidence Optical -> zed_left_camera_optical_frame
[zed_wrapper-2] 1626782939.705557798 [zed.zed_node] [INFO] * IMU -> zed_imu_link
[zed_wrapper-2] 1626782939.705567506 [zed.zed_node] [INFO] *** PUBLISHED TOPICS ***
[zed_wrapper-2] 1626782939.707024258 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/rgb/image_rect_color
[zed_wrapper-2] 1626782939.707302028 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/rgb/image_rect_gray
[zed_wrapper-2] 1626782939.707322016 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/rgb/camera_info
[zed_wrapper-2] 1626782939.707554742 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] 1626782939.707812806 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/rgb_raw/image_raw_gray
[zed_wrapper-2] 1626782939.707824709 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/rgb_raw/camera_info
[zed_wrapper-2] 1626782939.708081690 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left/image_rect_color
[zed_wrapper-2] 1626782939.708368288 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left/image_rect_gray
[zed_wrapper-2] 1626782939.708383837 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left/camera_info
[zed_wrapper-2] 1626782939.708632233 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left_raw/image_raw_color
[zed_wrapper-2] 1626782939.708908661 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left_raw/image_raw_gray
[zed_wrapper-2] 1626782939.708943937 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left_raw/camera_info
[zed_wrapper-2] 1626782939.709168088 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/right/image_rect_color
[zed_wrapper-2] 1626782939.709382750 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/right/image_rect_gray
[zed_wrapper-2] 1626782939.709398820 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/right/camera_info
[zed_wrapper-2] 1626782939.709616428 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/right_raw/image_raw_color
[zed_wrapper-2] 1626782939.709841200 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/right_raw/image_raw_gray
[zed_wrapper-2] 1626782939.709856068 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/right_raw/camera_info
[zed_wrapper-2] 1626782939.710092992 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/depth/depth_registered
[zed_wrapper-2] 1626782939.710107659 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/depth/camera_info
[zed_wrapper-2] 1626782939.710233295 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/stereo/image_rect_color
[zed_wrapper-2] 1626782939.710357728 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] 1626782939.710484155 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/confidence/confidence_map
[zed_wrapper-2] 1626782939.710766705 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/disparity/disparity_image
[zed_wrapper-2] 1626782939.710920634 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/point_cloud/cloud_registered
[zed_wrapper-2] 1626782939.711115930 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/pose
[zed_wrapper-2] 1626782939.711266482 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/pose_with_covariance
[zed_wrapper-2] 1626782939.711515980 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/odom
[zed_wrapper-2] 1626782939.711659990 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/path_map
[zed_wrapper-2] 1626782939.711776078 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/path_odom
[zed_wrapper-2] 1626782939.711932040 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/imu/data
[zed_wrapper-2] 1626782939.712046314 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/imu/data_raw
[zed_wrapper-2] 1626782939.712191166 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/temperature/imu
[zed_wrapper-2] 1626782939.712318825 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/imu/mag
[zed_wrapper-2] 1626782939.712454199 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/atm_press
[zed_wrapper-2] 1626782939.712556341 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/temperature/left
[zed_wrapper-2] 1626782939.712663862 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/temperature/right
[zed_wrapper-2] 1626782939.712878364 [zed.zed_node] [INFO] Advertised on topic: /zed/zed_node/left_cam_imu_transform [LATCHED]
[zed_wrapper-2] 1626782939.712889986 [zed.zed_node] [INFO] Camera-IMU Translation:
[zed_wrapper-2] -0.002 -0.023 -0.002
[zed_wrapper-2] 1626782939.712914382 [zed.zed_node] [INFO] Camera-IMU Rotation:
[zed_wrapper-2] 7FFC9483C7D0
[zed_wrapper-2] 0.999995 0.003136 -0.000548
[zed_wrapper-2] -0.003136 0.999994 -0.001484
[zed_wrapper-2] 0.000544 0.001486 0.999999
[zed_wrapper-2]
[zed_wrapper-2] 1626782939.712944689 [zed.zed_node] [INFO] Published static TF: 'zed_imu_link' -> 'zed_left_camera_frame'
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[rviz2-3] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-3] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.10/src/buffer_core.cpp
[zed_wrapper-2] 1626782939.725892426 [zed.zed_node] [INFO] Static transform Sensor to Base [zed_left_camera_frame -> base_link]
[zed_wrapper-2] 1626782939.725929366 [zed.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] 1626782939.725939955 [zed.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1626782939.725957458 [zed.zed_node] [INFO] Static transform Sensor to Camera Center [zed_left_camera_frame -> zed_camera_center]
[zed_wrapper-2] 1626782939.725964261 [zed.zed_node] [INFO] * Translation: {0.000,-0.060,0.000}
[zed_wrapper-2] 1626782939.725972286 [zed.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1626782939.725982726 [zed.zed_node] [INFO] Static transform Camera Center to Base [zed_camera_center -> base_link]
[zed_wrapper-2] 1626782939.725989278 [zed.zed_node] [INFO] * Translation: {0.000,0.000,0.000}
[zed_wrapper-2] 1626782939.726009125 [zed.zed_node] [INFO] * Rotation: {0.000,-0.000,0.000}
[zed_wrapper-2] 1626782939.729270731 [zed.zed_node] [INFO] *** Starting Positional Tracking ***
[zed_wrapper-2] 1626782939.729349699 [zed.zed_node] [INFO] * Waiting for valid static transformations...
[zed_wrapper-2] 1626782939.829402451 [zed.zed_node] [INFO] Initial ZED left camera pose (ZED pos. tracking):
[zed_wrapper-2] 1626782939.829467733 [zed.zed_node] [INFO] * T: [0,0.06,0]
[zed_wrapper-2] 1626782939.829508900 [zed.zed_node] [INFO] * Q: [0,0,0,1]
[zed_wrapper-2] 1626782940.004520724 [zed.zed_node] [INFO] Odometry aligned to last tracking pose