A 24 channel LED driver module with CAN bus interface and Arduino-compatible microcontroller.
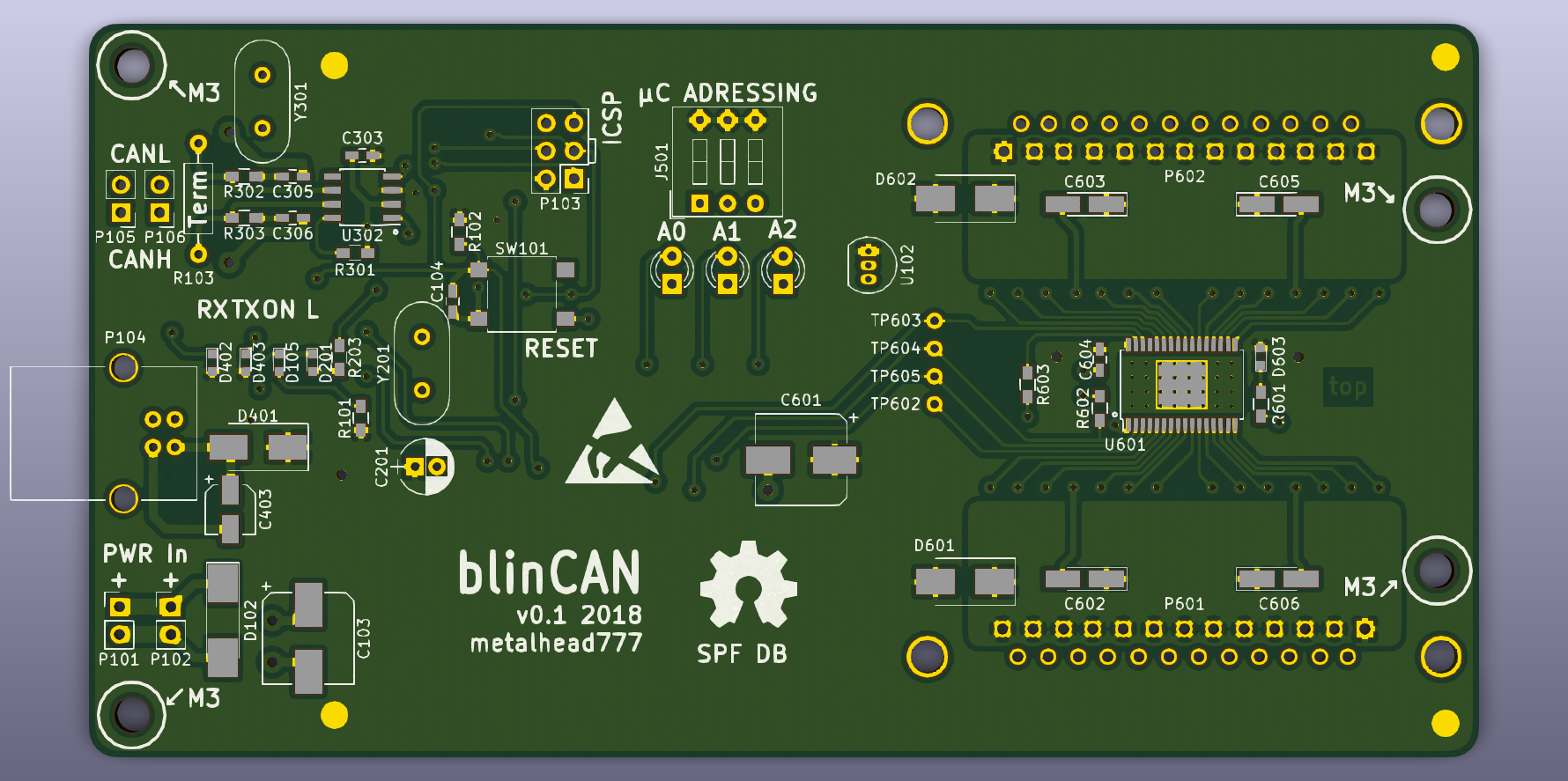 blinCAN v0.1 2018 top
blinCAN v0.1 2018 top
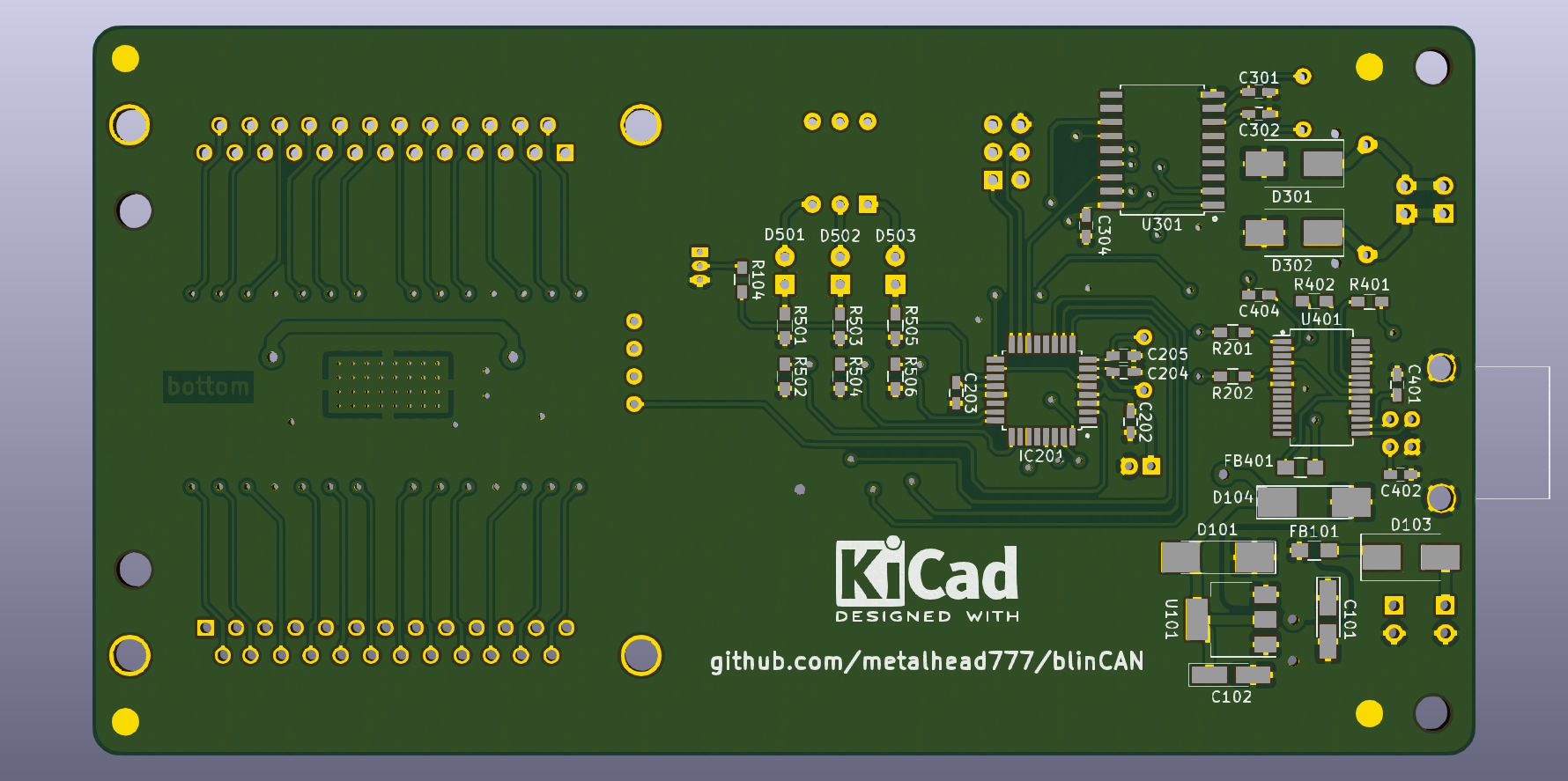 blinCAN v0.1 2018 bottom
blinCAN v0.1 2018 bottom
The blinCAN is based on a multi-channel power LED driver module developed for the Desert Eyes project. It is matched to a small-scale construction prototype dome, which served to test construction and lighting patterns for the full-scale dome.
This module is built around a TLC5947 PWM LED driver IC, which is connected to an ATmega328 microcontroller. For communication, a MCP2551 CAN transceiver and a MCP2515 CAN controller with SPI interface to the microcontroller are utilized. A FT232R USB to UART interface has been added to allow programming via USB, once a bootloader is flashed onto the microcontroller. For ambient air temperature sensing, a LM35 temperature sensor has been placed near the LED driver IC. A DIP switch is used to set a hardware-level address on each device, which also gets indicated by corresponding LEDs. For easier connection of an already wired LED harness, 25-pin SUB-D connectors are used on the output.
On the small-scale construction prototype dome, a Raspberry Pi with a CAN bus HAT was used as a host to centrally generate and send lighting patterns to six blinCAN modules via the CAN bus. Each blinCAN module had a unique address within the CAN bus, and every LED on the dome was purposely connected to a predefined module output. This way, every LED on the dome's shell was distinctly addressable in 3D space. An underlying look-up-table in the host's software was used to map each pattern lighting point to an LED.
Currently the blinCAN is in early development state in version 0.1. This means, that the hardware is tested and working on a small prototype scale production. Long-term testing (temperature, vibration, EMI) has not been performed yet. In this state the blinCAN is fit to be used for embedded systems and small-scale lighting projects. Any large-scale production is not encouraged, since additional optimization in the hardware layout needs to be done for that.
A few prototypes have been built and successfully tested prior to releasing this repository.
After assembly, the device can only be programmed using an ICSP in-circuit-programmer. The connector with the reference P103 serves as ICSP header. The square pad is ICSP Pin 1 (MISO).
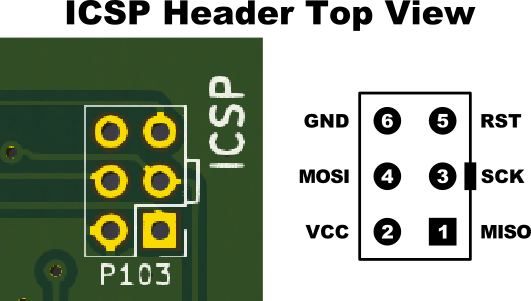
P103 ICSP header pin connection
The blinCAN firmware can be flashed directly to the ATmega328P-AU using an In-Series Programmer (ISP). The reset-button needs to be pressed during microcontroller flashing
For editing the blinCAN firmware or testing any other Arduino-compatible code, the Arduino bootlader needs to be flashed first to the ATmega328P-AU used for the blinCAN. A tutorial on flashing the Arduino bootloader can be found here. Use the following settings under "Tools" in the Arduino IDE, if you use another Arduino as a flashing device (ISP):
| Parameter | Value |
|---|---|
| Board | "Arduino Nano" |
| Processor | "ATmega328P" |
After flashing the Arduino bootloader, any further programming can be done using the USB type B connector (P104) on the blinCAN.
- Reset-button needs to be pressed during microcontroller flashing
- The TLC5947 has a thermal pad, which makes it the only component not solderable by purely using a soldering iron. Using a heatgun to heat the pad from the bottom side, applying solder and then placing the TLC5947 onto it has been done successfully for the prototypes.
- Add Bill of Materials (BOM) for all non-KiCAD users
- Clean up trace routing around TLC5947
- Increase number of hardware address bits
- Change LED output voltage to board input voltage instead of fix 5 V
- Add polyfuse for input overcurrent protection
- Add additional mounting points for Raspberry Pi (host system)
- KiCAD website
- Licensed under GPL Version 3
- Arduino website
- Arduino nano Rev. 3 schematic
- Licensed under CC BY-SA 3.0
- SparkFun website
- SparkFun CAN-Bus Shield on GitHub
- SparkFun CAN-Bus Shield Rev. 13 schematic
- Licensed under CC BY-SA 4.0
This project is open source and licensed under Creative Commons Attribution Share Alike 4.0.
Please refer to License.md for the full legal text. Thanks to idleberg on GitHub for the Markdown format.
The project is distributed as-is. No warranty is given.