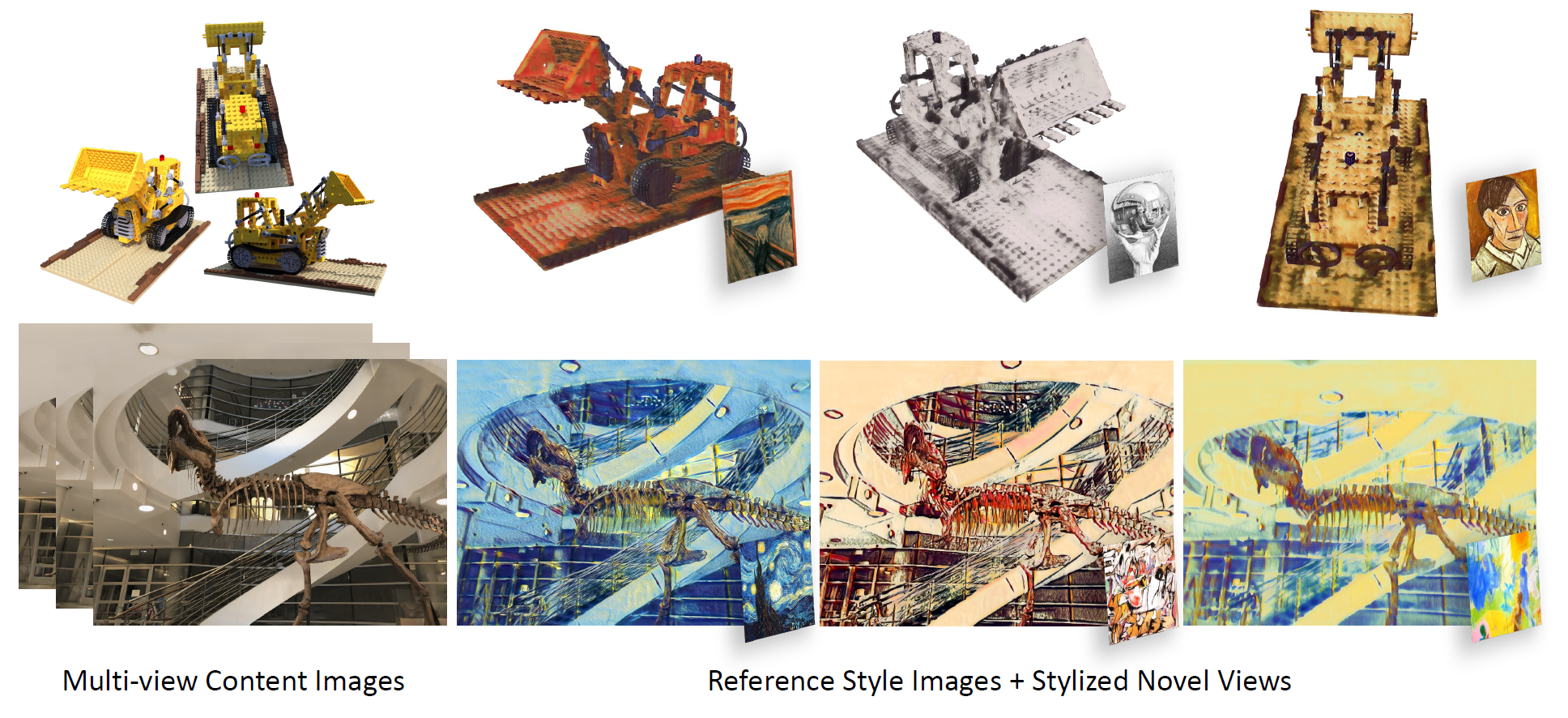
This repository contains a pytorch implementation for the paper: StyleRF: Zero-shot 3D Style Transfer of Neural Radiance Fields. StyleRF is an innovative 3D style transfer technique that achieves superior 3D stylization quality with precise geometry reconstruction and it can generalize to various new styles in a zero-shot manner.
Tested on Ubuntu 20.04 + Pytorch 1.12.1
Install environment:
conda create -n StyleRF python=3.9
conda activate StyleRF
pip install torch torchvision
pip install tqdm scikit-image opencv-python configargparse lpips imageio-ffmpeg kornia lpips tensorboard
Please put the datasets in ./data. You can put the datasets elsewhere if you modify the corresponding paths in the configs.
We provide some trained checkpoints in: StyleRF checkpoints
Then modify the following attributes in scripts/test_style.sh:
--config: chooseconfigs/llff_style.txtorconfigs/nerf_synthetic_style.txtaccording to which type of dataset is being used--datadir: dataset's path--ckpt: checkpoint's path--style_img: reference style image's path
To generate stylized novel views:
bash scripts/test_style.sh [GPU ID]
The rendered stylized images can then be found in the directory under the checkpoint's path.
Current settings in
configsare tested on one NVIDIA RTX A5000 Graphics Card with 24G memory. To reduce memory consumption, you can setbatch_size,chunk_sizeorpatch_sizeto a smaller number.
We follow the following 3 steps of training:
This step is for reconstructing the density field, which contains more precise geometry details compared to mesh-based methods. You can skip this step by directly downloading pre-trained checkpoints provided by TensoRF checkpoints.
The configs are stored in configs/llff.txt and configs/nerf_synthetic.txt. For the details of the settings, please also refer to TensoRF. The checkpoints are stored in ./log by default.
You can train the original TensoRF by:
bash script/train.sh [GPU ID]
This step is for reconstructing the 3D gird containing the VGG features.
The configs are stored in configs/llff_feature.txt and configs/nerf_synthetic_feature.txt, in which ckpt specifies the checkpoints trained in the first step. The checkpoints are stored in ./log_feature by default.
Then run:
bash script/train_feature.sh [GPU ID]
This step is for training the style transfer modules.
The configs are stored in configs/llff_style.txt and configs/nerf_synthetic_style.txt, in which ckpt specifies the checkpoints trained in the second step. The checkpoints are stored in ./log_style by default.
Then run:
bash script/train_style.sh [GPU ID]
The code for training StyleRF on the Tanks&Temples dataset is available on the 360 branch. To access it, run git checkout 360.
This repo is heavily based on the TensoRF. Thank them for sharing their amazing work!
If you find our code or paper helps, please consider citing:
@inproceedings{liu2023stylerf,
title={StyleRF: Zero-shot 3D Style Transfer of Neural Radiance Fields},
author={Liu, Kunhao and Zhan, Fangneng and Chen, Yiwen and Zhang, Jiahui and Yu, Yingchen and El Saddik, Abdulmotaleb and Lu, Shijian and Xing, Eric P},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={8338--8348},
year={2023}
}









































































































