This is the project repo for the final project of the Udacity Self-Driving Car Nanodegree: Programming a Real Self-Driving Car.
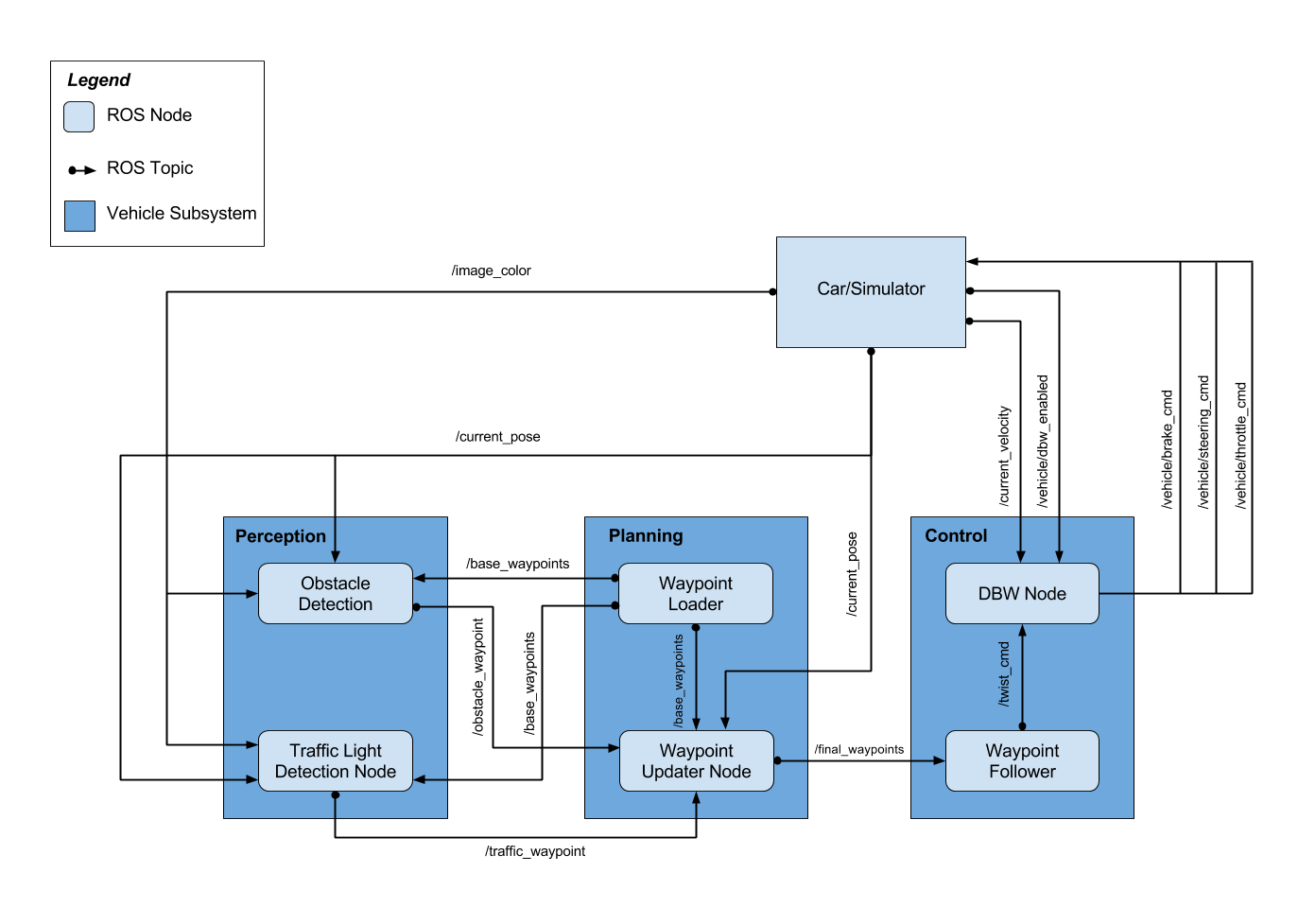
The following is a system architecture diagram showing the ROS nodes and topics used in the project.
Our team(BR) has four members.
| Team member name | Udacity account email | Location |
|---|---|---|
| Hironori Nagai - Team Lead | [email protected] | Japan |
| Raphaell Maciel de Sousa | [email protected] | Brazil |
| Guilherme Bortolaso | [email protected] | Brazil |
| James Lee | [email protected] | USA |
The Traffic light will be detected by a relatively compact ssd_mobilenet_v1_coco_2017_11_17 at high speed. The class ID of the traffic light of this model is 10. After detecting the traffic light, classify the color of the traffic light. A classifier using CNN and FCN was applied. Good results were obtained in Simulator and Real World Testing.
The traffic light detection model is compressed. Please extract it and use it.
cd CarND-Capstone/ros/src/tl_detector/
tar -xvzf ssd_mobilenet_v1_coco_2017_11_17.tar
This node realize to update the target speed characteristic of each waypoint based on traffic signal and obstacle detection data.
This node finally calculates throttle, brake, steering angle.
The running scene of the car in the simulator and the signal detection result in the real world are shown below.





This is the project repo for the final project of the Udacity Self-Driving Car Nanodegree: Programming a Real Self-Driving Car. For more information about the project, see the project introduction here.
Please use one of the two installation options, either native or docker installation.
-
Be sure that your workstation is running Ubuntu 16.04 Xenial Xerus or Ubuntu 14.04 Trusty Tahir. Ubuntu downloads can be found here.
-
If using a Virtual Machine to install Ubuntu, use the following configuration as minimum:
- 2 CPU
- 2 GB system memory
- 25 GB of free hard drive space
The Udacity provided virtual machine has ROS and Dataspeed DBW already installed, so you can skip the next two steps if you are using this.
-
Follow these instructions to install ROS
- ROS Kinetic if you have Ubuntu 16.04.
- ROS Indigo if you have Ubuntu 14.04.
-
- Use this option to install the SDK on a workstation that already has ROS installed: One Line SDK Install (binary)
-
Download the Udacity Simulator.
Build the docker container
docker build . -t capstoneRun the docker file
docker run -p 4567:4567 -v $PWD:/capstone -v /tmp/log:/root/.ros/ --rm -it capstoneTo set up port forwarding, please refer to the instructions from term 2
- Clone the project repository
git clone https://github.com/udacity/CarND-Capstone.git- Install python dependencies
cd CarND-Capstone
pip install -r requirements.txt- Make and run styx
cd ros
catkin_make
source devel/setup.sh
roslaunch launch/styx.launch- Run the simulator
- Download training bag that was recorded on the Udacity self-driving car.
- Unzip the file
unzip traffic_light_bag_file.zip- Play the bag file
rosbag play -l traffic_light_bag_file/traffic_light_training.bag- Launch your project in site mode
cd CarND-Capstone/ros
roslaunch launch/site.launch- Confirm that traffic light detection works on real life images

