本项目是北京理工大学世纪杯参赛作品,现将其开源,欢迎交流。

IDE:MDK5
代码生成器:STM32CUBEMX 4.26.1
代码生成器固件版本:FW_F4 V1.21.0
建模软件:SOLIDWORKS 2019
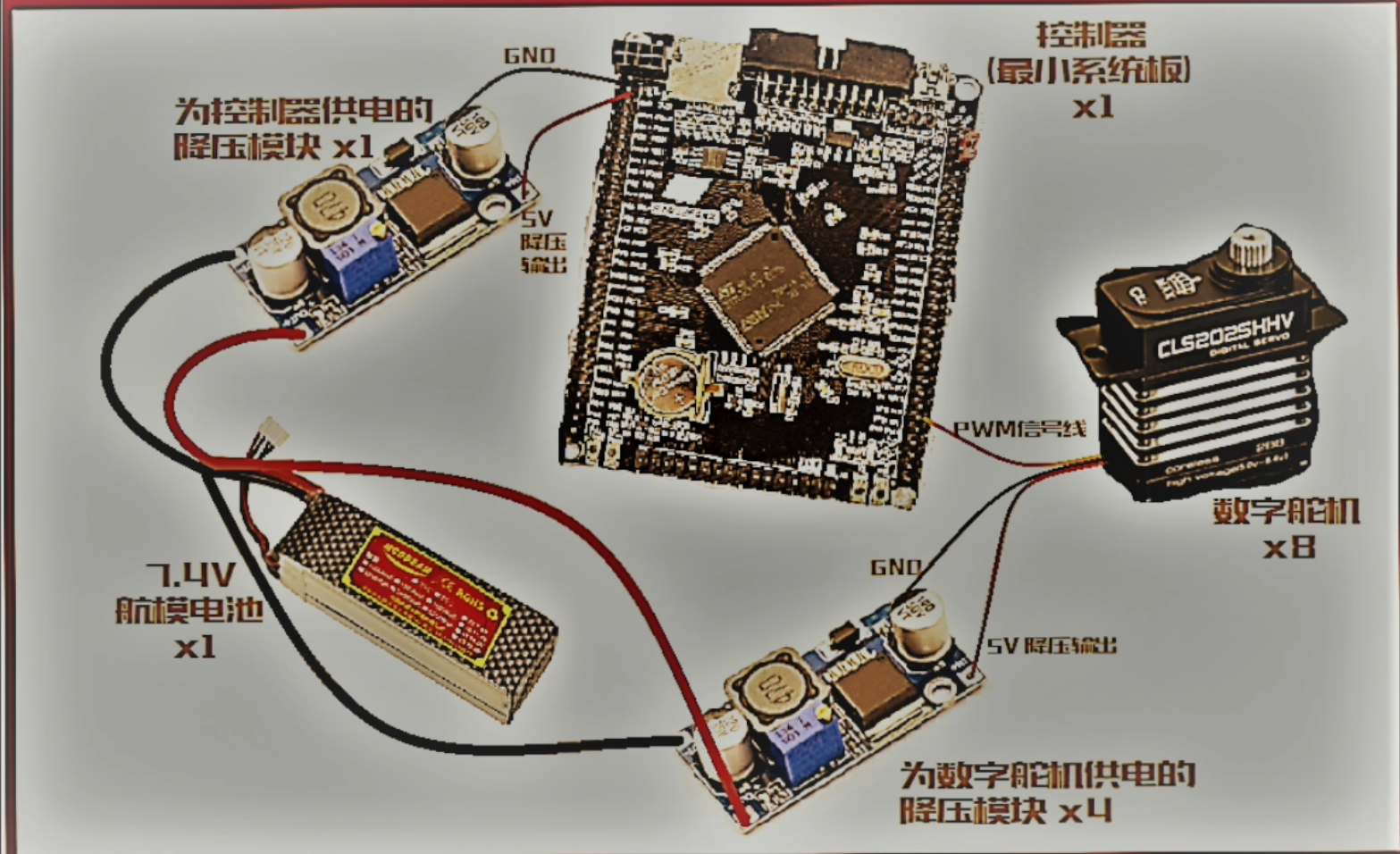
主控单片机:STM32F407VE
IMU:MPU6050
稳压模块:LM2596HVS,共五块,每条腿一块,控制部分一块
电池:2s航模电池
舵机:KingMax CLS2025
代码主要分为控制、遥控、通讯部分,使用者可以着重阅读控制部分,即Little-Doggy-Run\Src\control_task.c
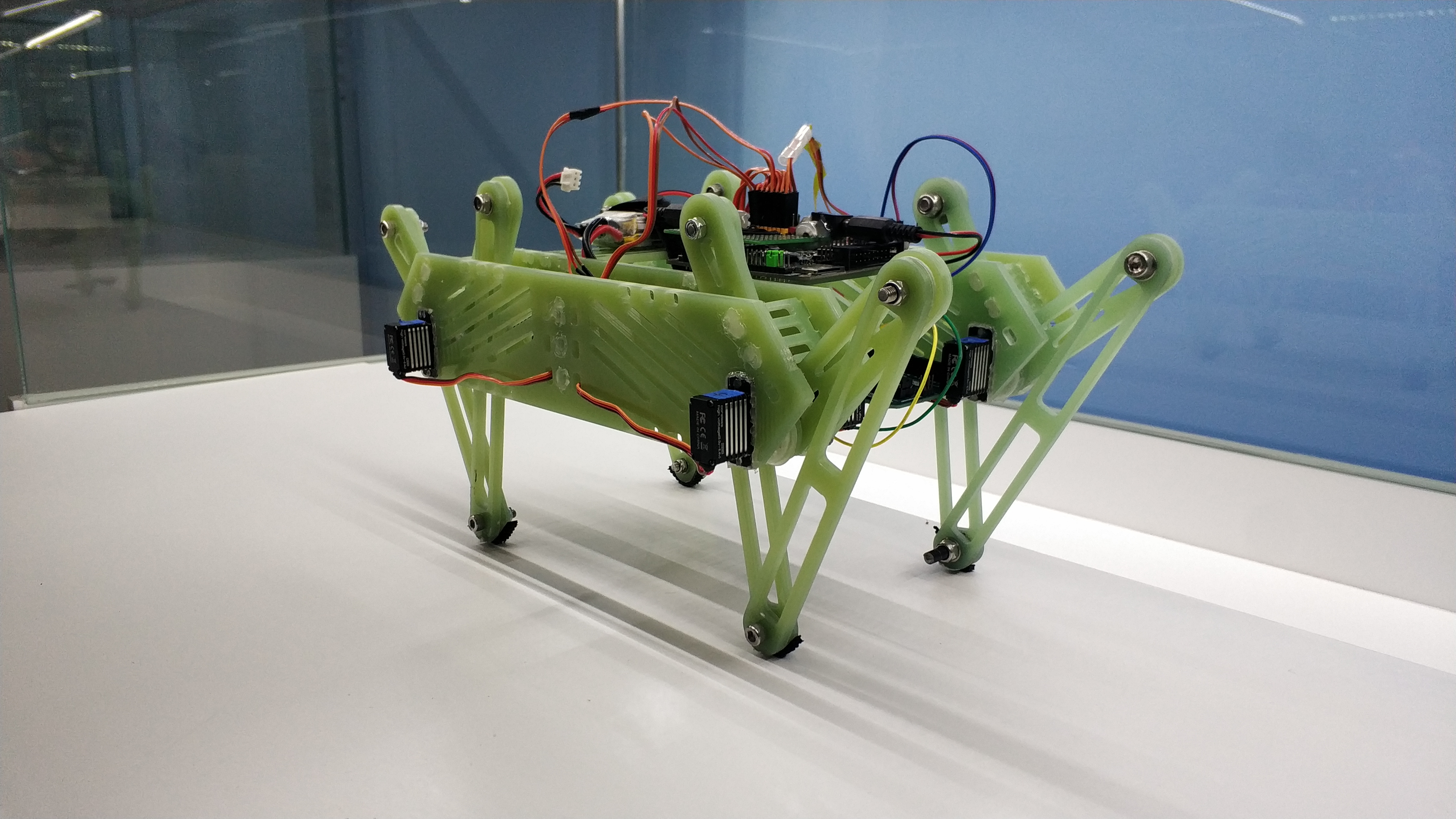
机架设计采用了玻纤板拼接式结构,经验证该结构稳定,但是过重,使用碳纤材料可以解决问题。
腿部设计采用了五连杆机械结构,是一个两自由度的腿部。
舵机与大腿的连接采用了柔软的热熔胶连接,原因部分是为设计方便,另一部分为了是尽量吸收大幅度的震动,使得机体运行更稳定。

